高质量实时渲染

OpenGL
Vertex Shader & Fragment Shader
- For each vertex in parallel 每一个顶点都要做
- 在 OpenGL 中调用程序定义的 vertex shader:做顶点变换,包括 MVP 变换、需要插值的属性输出给 fragment shader
- For each primitive, OpenGL rasterizes 对每一个片元,OpenGL 进行 打成一堆像素
- Generates a fragment for each pixel the fragment covers
- For each fragment in parallel 每一个片段都要做
- 在 OpenGL 中调用程序定义的 fragment shader:做着色和光照计算
Shadow Mapping
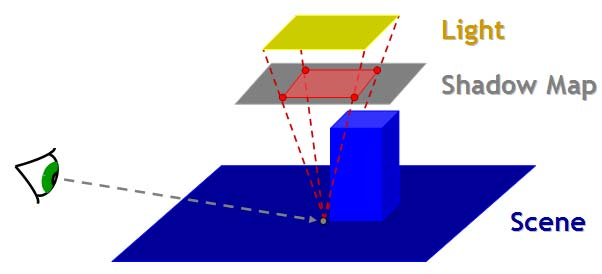
Render from Light & Eye
- Pass 1: Output a “depth texture” from the light source 从光源的角度出发生成一幅深度图
- Pass 2: Render a standard image from eye
Project to light for shadows
- Project visible points in eye view back to light source 连向光源,比较场景上的深度和 Shadow Map 中的深度的大小
Issues in Shadow Mapping
Self Occlusion
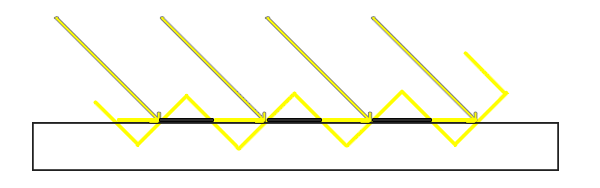
从光源的角度看场景所形成的 shadow map 是一个离散的图,shadow map 上一个像素所覆盖的区域是的 深度值 则为一个 常数,也就是说 shadow map 记录的深度不是连续的,与实际场景不符。当进行第二次 Pass 时,从场景某一点出发看向光源,就会被遮挡住,如图中黑色部分
如果光源方向从上往下垂直照向平面的时候没有自遮挡的问题,如果光源方向几乎平行与平面时自遮挡的问题最严重
Adding a (variable) bias to reduce self occlusion
如果实际的深度与 光源深度 的差值小于某个阈值就不算遮挡,相当于遮挡物距场景长的点足够小就忽略这个遮挡物。这个阈值可以不是一个常数,可以根据光源的角度变化。也可以从下图去理解这个 Shadow Bias。
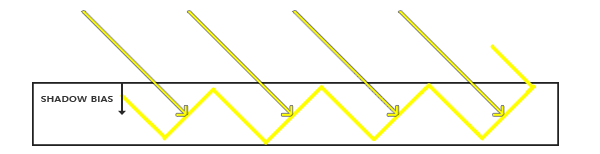
但是可能回造成悬浮(Peter Panning)的问题,因为物体看起来轻轻悬浮在表面之上。
解决方案(目前没有完美的解决方案):
找到一个合适的 Shadow Bias——工业界的解决方法
Second-dpeth shadow mapping——实际中没有人用
- Using the midpoint between first and second depths in shadow map
- requires objects to be waterlight
- the overhead may not worth it
Alias
实时渲染中阴影背后的数学知识
There are a lot of useful inequalities in caculus
设
Schwarz 不等式
Minkowksi 不等式
在实时渲染中不太关心不等,关心的是近似相等,贯穿整个实时渲染的一个重要的不等式如下:
什么时候上述不等式更加准确:
的 support 足够小 是足够光滑的
Percentage Closer Soft Shadows
Percentage Closer Filtering
- Perform multipule(e.g.
) depth comparisons for each fragment - Then, averages result of comparisons
过滤或平均的是什么?
平均的是任意 shading point 做的很多次阴影深度比较的结果,既不是对 shadow map 做模糊操作,也不是对最后的阴影图做模糊操作
- Perform multipule(e.g.
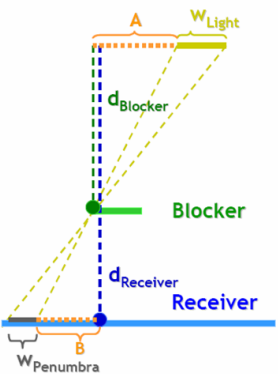
Filter size <-> blocker distance 如何确定 filter 的大小
The complete algorithm of PCSS
- Step 1: Blocker search (getting the average blocker depth in a certain region)
- Step 2: Penumbra estimation (using the average blocker depth to determine the filter size)
- Step 3: Percentage Closer Filtering
Which region to perform blocker search? 如何确定 blocker 的大小
光源看去生成一个 shadow map,假设 shadow map 放在视锥体的近平面上,从 shading point 连向光源,计算在 shadow map 上覆盖的区域即为 blocker size
Variance Soft Shadow Mapping
A Deeper Look at PCF
Filter / Convolution
In PCSS
每一个 shadow map 上点的深度和场景上 点的深度比较,按照某种形式加权平均起来 Therefore, PCF is not filtering the shadow map then compare 并不是对 shadow map 做模糊然后比较
And PCF is not filtering the resulting image with binary visibilities 也不是最后的阴影图做模糊操作
Variance Soft Shadow Mapping
Which step(s) can be slow?
Variance Soft Shadow Mapping
PCF 可以理解为在一场考试中知道自己多少分,想知道自己的排名在百分之几,就需要把所有的人的成绩都统计出来,VSSM 则不需要知道所有人的成绩,就好比知道成绩的分布,然后根据自己的成绩就知道所在位置了
Key Idea: Quickly compute the mean and variance of depths in an area
Mean
- Hardware MIPMAPing
- Summed Area Tables(SAT)
Variance
利用期望和方差关系的公式, 可以由另外一个 shadow map,这个 shadow map 记录的时所有深度值的平方,在 OpenGL 中可以将这个深度平方的值记录在其他通道中(纹理由 R、G、B、A 四个通道,shadow map 占用一个通道) - Just generate a “square-depth map” along with the shadow map
Percentage of texels that are closer than the shading point 知道了期望和方差如何计算深度比 shading point 更近点的占比
可由单边切比雪夫不等式更快的算出来:
是均值, 是方差,只要知道均值和方差即可带入上述公式,但是必须满足 ,可以直观感受切比雪夫不等式 
Blocker search
假设 shading point 的深度是 7,已经知道了
- Key idea
- Blocker(
的部分,蓝色部分)的平均值记为 - Non-blocker(
的部分,红色部分)的平均值记为 - 满足
- 根据切比雪夫可以估计:
, - 又做了个假设:
,例如大多数的阴影接受物体是一个平面
- Blocker(
- Step 1 solved with negligible additional cost
SAT for Range Query
Need to quickly grab
and from an arbitrary range (rectangular) 需要快速计算出任意矩形范围内的均值和方差
对于均值
Classic data structure and algorithm (prefix sum) 经典数据结构——前缀和
一维
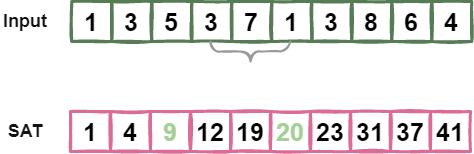
二维

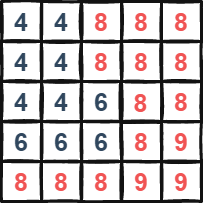
Moment Shadow Mapping
Moments
- 最简单的矩:
- VSSM is essentially using the first two orders of moments
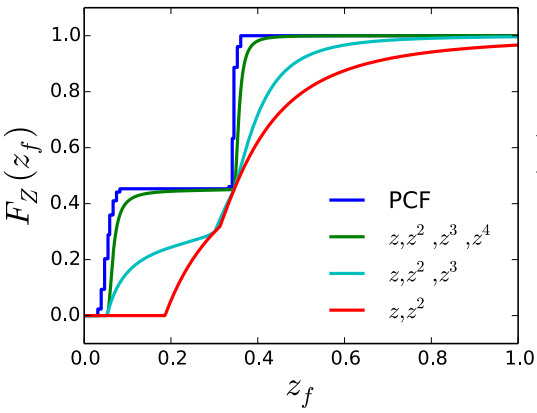
What can moments do?
- Conclusion: first
orders of moments can represent a function with steps - Usually, 4 is good enough to approximate the actual CDF of depth dist
Environment Mapping
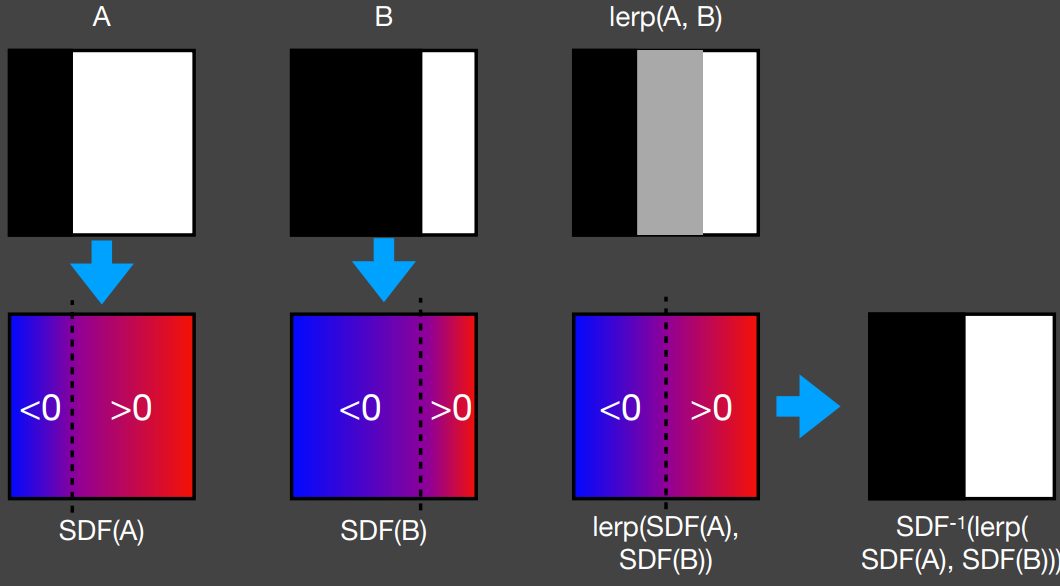
Distance Field Soft Shadow
Distance function: At any point, giving the minimun distance (could be signed distance) to the closest location on an object 在空间中的任何一个点,到某个物体表面的最小距离(距离场可以是有向的,比如在物体内部为负,在物体外部为正)
An Example: Blending (linear interp.) a moving boundary
The Usages of Distance Fields
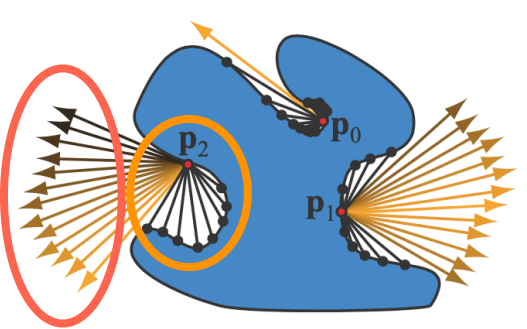
Ray marching (Sphere tracing) to perform ray-SDF intersection
任何一个点上都相当于定义了一个安全距离(safe distance),利用这个安全距离可以近似求出光线与场景中物体的交点
Use SDF to determine the (approx.) percentage of occlusion
把安全距离延申为安全角度(safe angle),最后转换为阴影的值
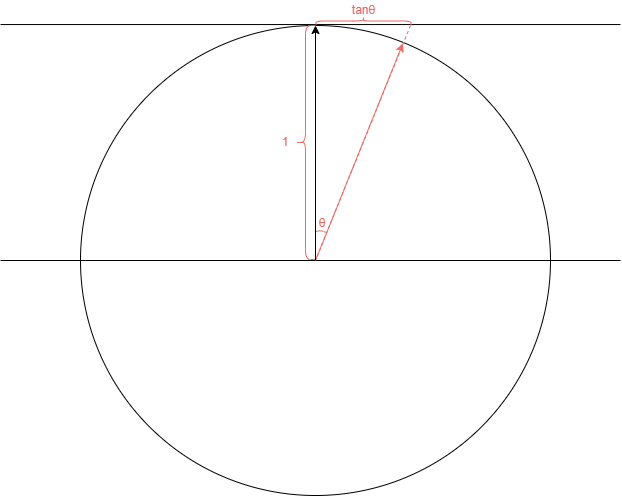
How to compute the safe angle?
利用反三角函数:
Shading from Environment Lighting
How to use it to shade point (without shadows)?

不考虑 visibility,任何一个 Shading Point 都要求解这个渲染方程,计算量特别大,不能用在实时渲染中,即如果存在采样(sample)的操作,就很难应用在实时渲染中
The Split Sum: 1st Stage
Recall: the approximation
Conditions for acceptable accuracy? 这个公式什么时候会比较准确
的 support 比较小的情况下→BRDF is glossy - 或者
的值比较 smooth 的情况下→BRDF is diffuse
于是就可以把光源项拆出来
拆出来的项相当于把 Light 对应区域积分并归一化,也就是把 IBL 表示的一张图进行 模糊为什么要做 pre-filtering:Then query the per-filtered environment lighting at the
(mirror reflected) drection
The Split Sum: 2nd Stage
如何避免对 BRDF 积分的采样,即
Idea:Precompute its value for all possible combinations of variables roughness, color(Fresnel term), etc. 预计算所有的参数的可能性
基于微表面的 BRDF 需要考虑的参数:
- fresnel term 菲尼尔项
- NDF 微表面的法线分布
Recall : Microfacet BRDF
菲尼尔项可以用 Schlick’s 方法近似:
法线分布可以使用 Beckmann distribution:
由于两个类型的角度可以近似,预计算的维度为三维,但仍然需要降维。可以把菲尼尔项的近似形式——Schlick’s 带入到积分中:
Each integral produces one value for each (roughness, incident angle) pair
在实时领域、工业界通常写为求和,所以也被称为 split sum 方法:
Shadow from environment lighting
In general, very difficult for real-time rendering 环境光照下的阴影做不到
Different perspectives of view
- As a many-light problem 环境光照可以认为是很多光源,每一个光源都要生成一个 Shadow Map 代价非常大
- As a sampling problem 通过解渲染方程需要大量的采样,求解 Visibility Term 项是最难的,只能盲目的采样
Industrial solution
Generate one (or a little bit more) shadows 从最亮的一个或几个光源下生成阴影
Precomputed Radiance Transfer
Background knowledge
Fourier Transform
Represent a function as a weighted sum of sines and cosines 一个函数可以写成若干
A general understanding
Any product integra can be considered as filtering 两个函数相乘再积分就认为是滤波操作
Basis Functions
A set of functions that can be used to represent other functions in general 一个函数可以描述为其他函数的线性组合
- The Fourier series is a set of basis functions
- The polynomial series can also be a set of basis functions (
)
Real-time environment lighting
Spherical Harmonics
定义:A set of 2D basis functions
defined on the sphere 一系列定义在球面上的二维基函数,“球面上”表示方向
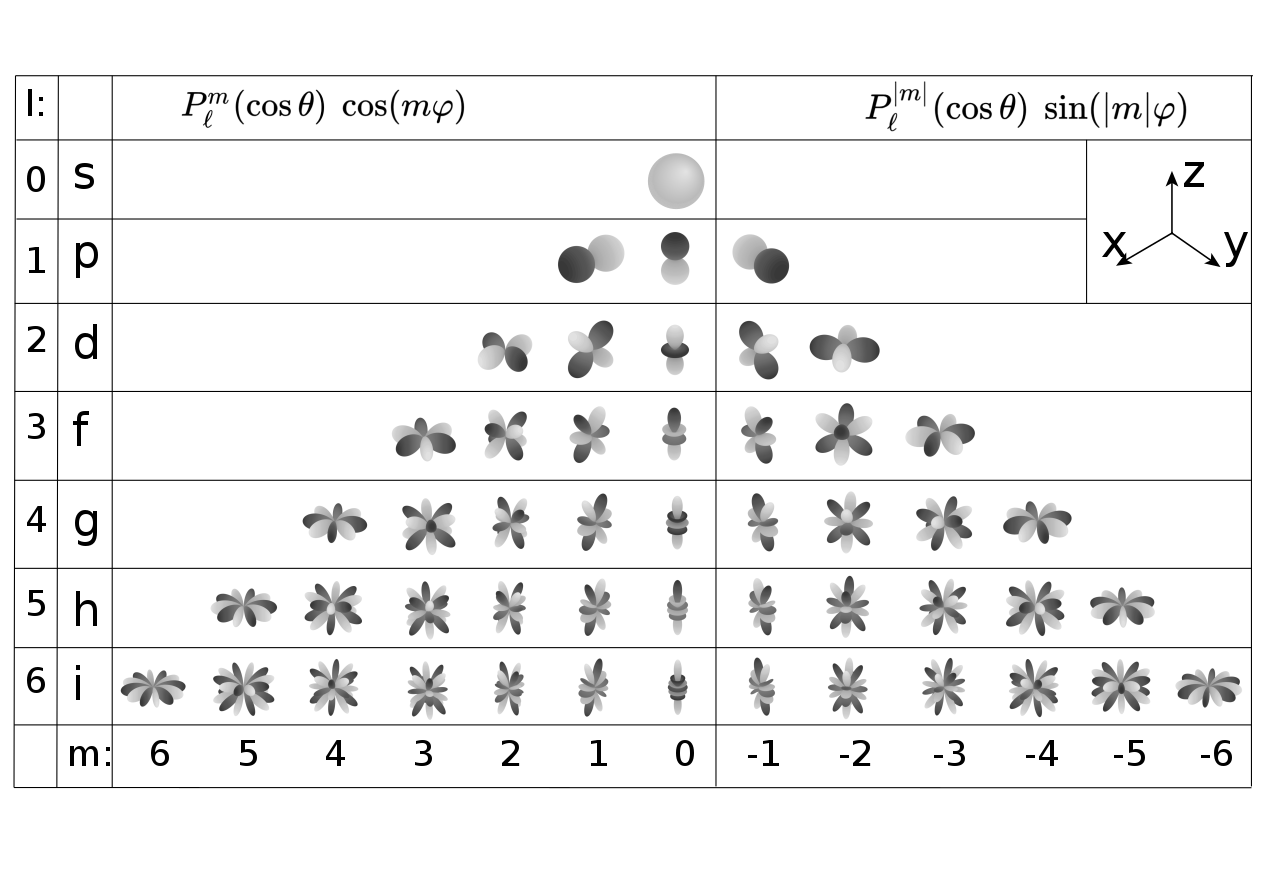
Alternative picture for the real spherical harmonics
Each SH basis function
is associated with a (Legendre) polynomial Projection: obtaining the coefficient of each SH basis function 已知任何一个二维的函数
,任何一个基函数对应的系数可以通过 Product Integral 获得,求系数的过程就叫做 投影
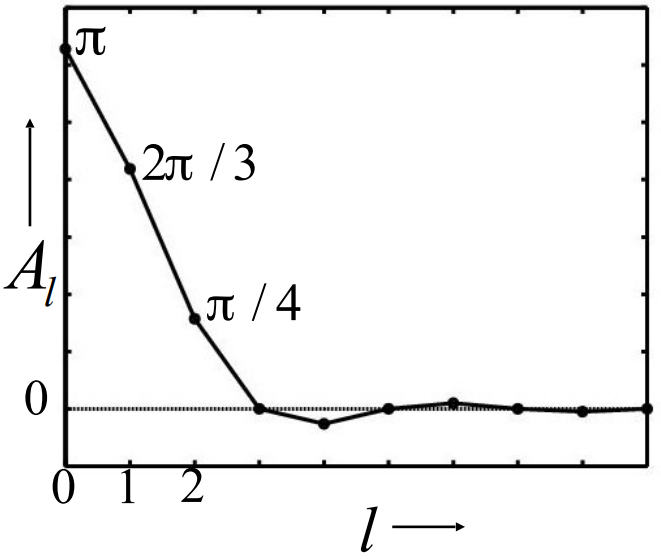
Analytic Irradiance Formula
用 SH 描述BRDF
用不同阶的 SH 描述 全局光照
对于任何的光照条件,只要材质是 Diffused,都可以用前三阶的 SH 来 描述光照
A Brief Summarization
- Usage of basis function
- Representing any function (with enough #basis) 足够多的基函数可以表示一个函数
- Keeping a certain frequency contents (with a low #basis) 保留一些低频信息,可以用前几阶的基函数
- Reducing integrals to dot products
- But here it’s still shading from environment lighting
- No shadows yet 仍然没有加入阴影
Precomputed Radiance Transfer
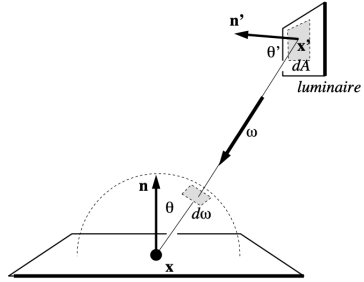
Rendering under environment lighting
:Ligghting Term 环境光 :Visibility Term 从一点往四面八方看,结果要么是 0,要么是 1 :BRDF Term 原本是四维的,但是从某个地方看即表示知道观察方向,也就知道了入射方向,就可以用二维变量描述
, incoming directions
,view directions
Brute-force computation 这三项都可以描述成二维的球面函数,如果这样计算量会特别大
Basic idea of PRT
假设:场景中其他所有的都不变,只有光照会发生变化,在这种情况下 light transport 也可以当作球面函数
- Approximate lighting using basis functions 把光照拆成 basis functions
- Precomputation stage
- compute light transport, and project to basis function space
- Runtime stage
- dot product (diffuse) or matrix-vector multiplication (glossy)
Diffuse Case
BRDF——
是一个常值
一种理解方式
上式中的
就是 light transport 的球面函数投影到某个基函数上的 系数 Reduce rendering computation to dot product
就是两个向量的点乘
另一种理解方式
- Separately precompute lighting and light transport
- 光照项分别为 lighting coefficient 和 basis functions
- 光照传输项分别为 lighting transport coefficient 和 basis functions
Why is it a dot product? (This seems to be
rather than ?) 虽然看起来像是二维的求和,但是根据 SH 的正交性,只有当
时积分不为 0;相当于计算二维矩阵对角线上的值
Glossy Case
与 Diffuse 的区别在于 BRDF,Diffuse 的 BRDF 是一个常数,Glossy 的 BRDF 表示不同方向入射光线照到物体表面,反射到不同的方向的结果,所以 Glossy 的 BRDF 是一个 四维 的向量。给定任意观察方向
Glossy 的物体有一个非常重要的性质——和视点有关 ,Diffuse 的物体和 视点无关
Interreflections and Caustics
- L:Light 光照
- E:Eye 眼睛
- G:Glossy
- D:Diffuse
- S:Specular
Runtime is independent of transport complexity
L(D|G)*E、LS*(D|G)*E 起点都是光照,终点都是视角,中间的部分都可以认为是 Light Transport,所以运行时的复杂度和 Light Transport 的复杂度无关
Basis Functions
Properties 性质
orthonormal 正交性
simple projection/reconstruction 投影易算
Projection to SH space
Reconstruction
simple rotation 旋转任意一个基函数某个角度,都可以被同阶的基函数线性组合得到
simple convolution
few basis functions: low freqs
More basis functions
Spherical Harmonics (SH)- Wavelet 定义在二维平面上
- 2D Haar wavelet
- Projection
- Wavelet Transformation
- Retain a small number of non-zero coefficients 保留了一小部分非零的基函数的系数
- A non-linear approximation 保留非零或最大的数值
- All-frequency representation 支持全频率表示
- 不支持快速旋转
- Zonal Harmonics
- Spherical Gaussian (SG)
- Piecewise Constant
Precomputation
light transport 投影到任何一个基函数上,相当于用 basis functions 所描述的环境光照,照亮各个物体,从而计算物体各个点上 shading 的值,相当于 render equation
Run-time Rendering
- Rendering at each point is reduced to a dot product
- First, project the lighting to the basis to obtain
- Or, rotate the lighting instead of re-projection
- Then, compute the dot product
- First, project the lighting to the basis to obtain
- Real-time: easily implemented in shader
Real-Time Global Illumination
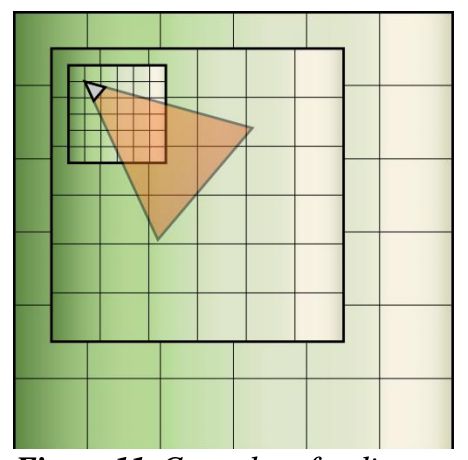
Reflective Shadow Maps (RSM)
Which surface patches are directly lit? 什么样的表面能都被光源直接照射到
- Perfectly solved with a classic shadow map 可以通过 Shadow Map 计算出
- Each pixel on the shadow map is a small surface patch Shadow Map 上的每一个像素都是一片次级光源
- Assumption
- Any reflector is diffuse 假设任何次级光源的材质都是 Diffuse
- Therefore, outgoing radiance is uniform toward all directions
What is the contribution from each surface patch to
- An integration over the solid angle covered by the patch
- Can be converted to the integration on the area of the patch
For a diffuse reflective path
Therefore
Not all pixels in the RSM can contribute
- Visibility 可见性
- Orientation 方向
- Distance 距离
What is needed to record in an RSM?
- Depth
- World coordinate
- Normal
- flux
- etc.
Light Propagation Volumes (LPV)
Key problem
Query the radiance from any direction at any position 从任何一个方向到达任意一点的 radiance 是多少
Key Idea
Radiance travels in straight line and does not change radiance 在传播过程中不会衰减
Key solution
Use a 3D grid to propagate radiance from directly illuminated surfaces to anywhere else
Steps
Generation of raidance point scene representation 哪些点作为次级光源(哪些点接收到直接光照)
- This is to find directly lit surfaces 哪些 surface 被直接照亮
- Simply applying RSM would suffice 可以利用 RSM
- May use a reduces set of diffuse sufface patches (virtual light sources) 不必要所有的 patch 都当作次级光源,可以利用采样等方法降低 patch 的数量
Injection of point cloud of virtual light sources into radiance volume 把场景中接收到直接光照的点放到场景中划分好的格子中
- Pre-subdivide the scene into a 3D grid 首先场景中有一个三维的格子,工业界大多数用三维纹理
- For each grid cell, find enclosed vitual light sources 每个格子内都有朝向不同的次级光源
- Sum up their directional radiance distribution 把这些次级光源的 radiance 累加
- Project to first 2 orders of SHs (4 in total) 利用 SH 对每个格子内的次级光源的分布进行压缩
Volumtric radiance propagation
For each grid cell collect the radiance received from each of its 6 faces
Sum up, and again use SH to represent
Repeat this propagation several times till the volume becomes stable 迭代
Scene lighting with final light propagation volume 传播完成后就知道了场景中每个格子上的 radiance,直接拿去渲染
- For any shading point, find the grid cell it is located in
- Grab the incident radiance in the grid cell (from all directions)
- Shade
Light leaking

假设
点是次级光源,但是无论如何都不会有从 点反射出去的 radiance 到右边的情况,但是由于把场景划分成格子,这两个点都在一个格子里面,所以这两个点的 radiance 是一样的。如果格子划分的特别小是可以解决 light leaking 的问题,但是计算时间和存储的问题,工业界会用不同分辨率的格子——cascade
Voxel Global Illumination (VXGI)
- Still a two-pass algorithm
- Two main diffetences with RSM
- Directly illuminated pixels -> (hierachical) voxel 从 RSM 的像素表示的微小的表面到整个场景划分出来具有层次结构的格子
- Sampling on RSM -> tracing reflected cones in 3D (Note the inaccuracy in sampling RSM) RSM 和 LPV 做传播都是 ray-tracing(每个点用一个光线传播),VXGI 是 cone-tracing(每个点用锥形的形式进行光线传播)
Real-Time Global Illumination (Screen Space)
What’s is “screen space”?
- Using information only from “the screen”
- In other words, post processing on existing renderings
Screen Space Ambient Occlusion (SSAO)
Why AO? 为什么要Ambient Occlusion
- Cheap to implement
- But enhances the sense of relative positions 通过阴影的方式,物体的立体感的更加明显了
What is SSAO?
- An approximation of global illumination 对全局光照的近似
- In screen space
Theory
Still, everything starts from the rendering equation
And again
Sepatating the visibility term 把 visibility 项拆除去
乘号
左边一项可以写为(the weight-averaged visibility from all directions): 乘号
右边一项可以写为(constant for AO): A deeper understanding 1
the averagein the support of A deeper understanding 2
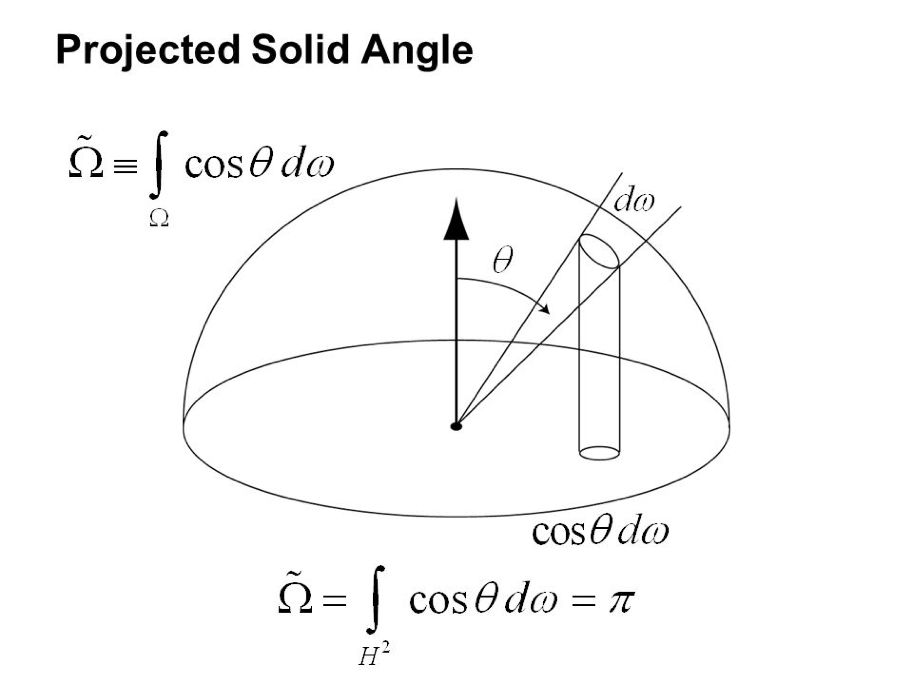
Why can we take the cosine term with
? Projected solid angle
将单位球上的面积投影到一个单位圆上
- unit hemisphere -> unit disk
- integration of peojected solid angle -> the area of the unit disk
Actually, a much simpler understanding
Uniform incident lighting -
is constant Diffuse DSDF -
is also constant Therefore, taking both out of the integral:
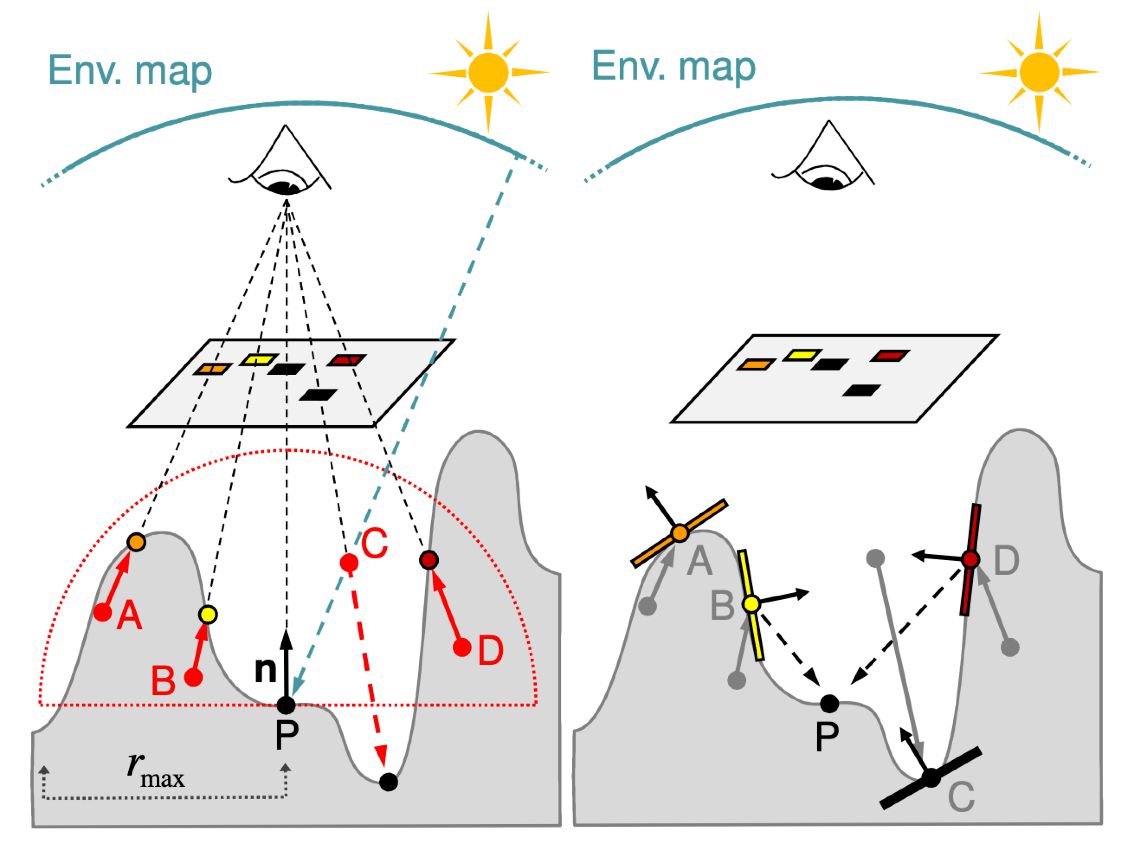
Ambient occlusion using the z-buffer
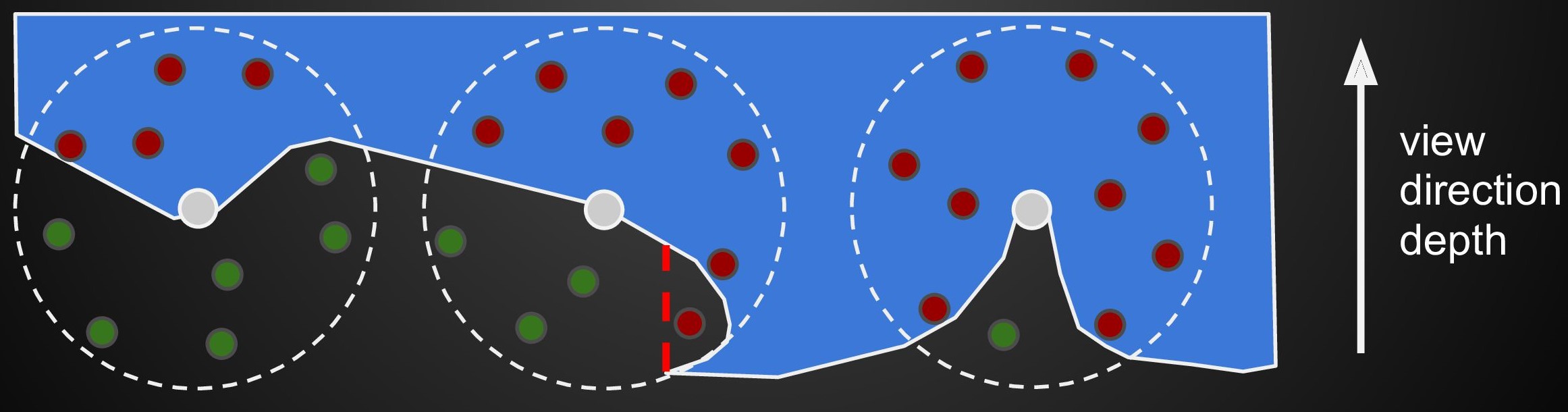
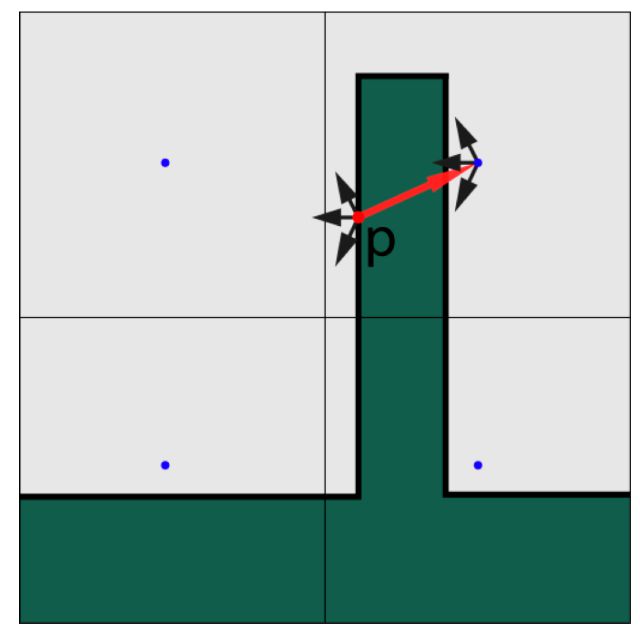
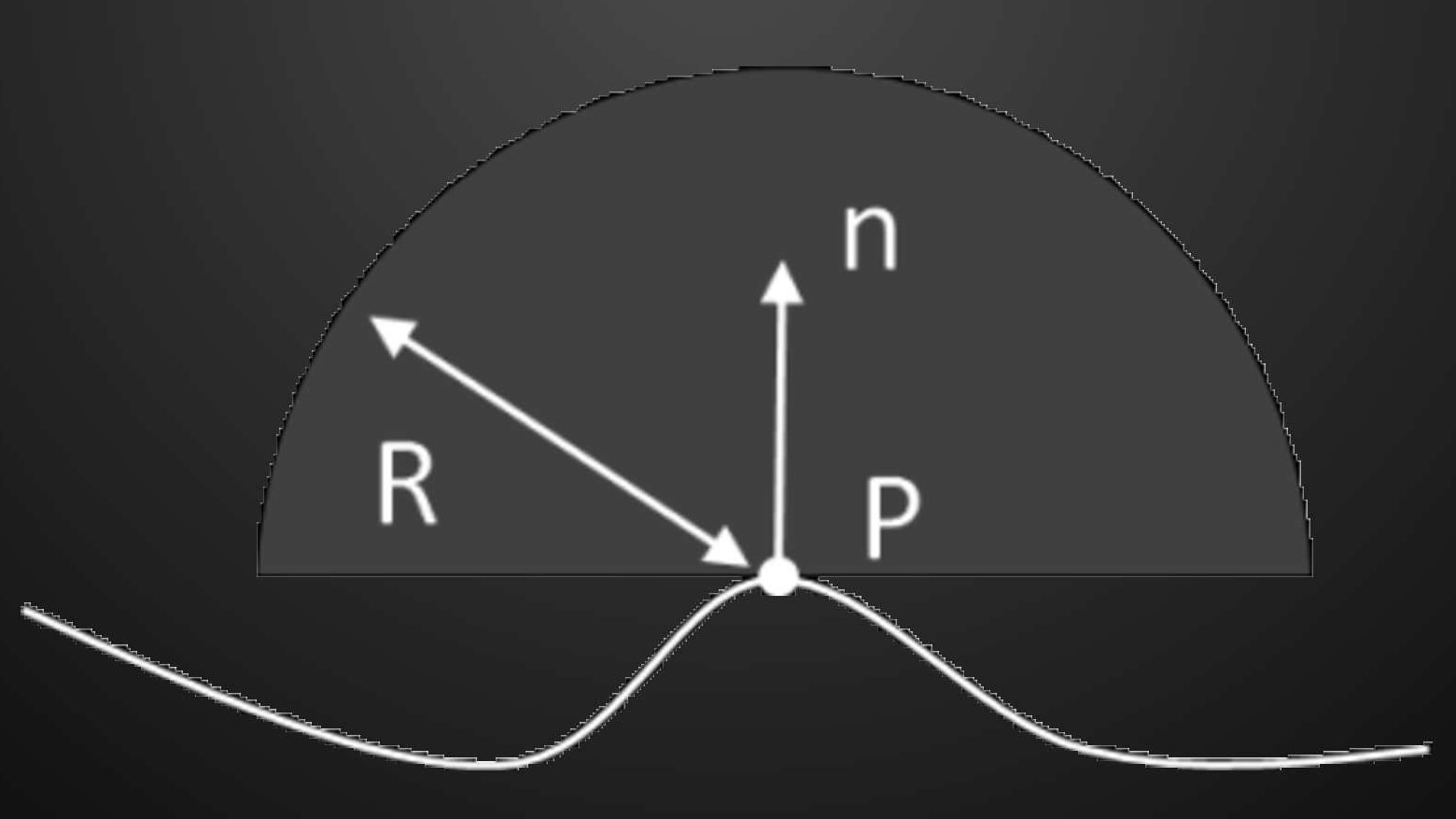
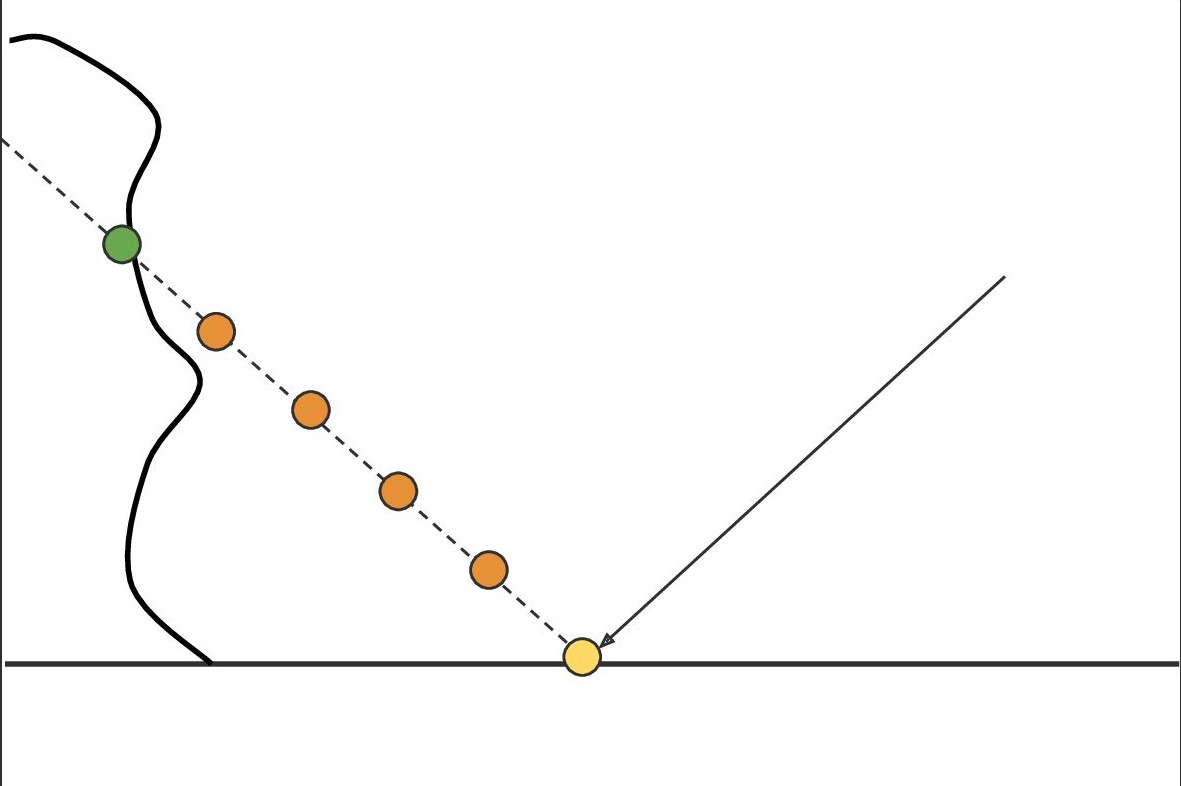
- Using the readily available depth buffer as an approximation of the scene geometry 任何一个 Shading Point 都以自身为中心,半径为
的球内部采样一些点,判断采样点能否被 Shading Point 看到 - Take samples in a sphere around each pixel and test against buffer
- If more than half the samples are inside, AO is applied, amount depending on ratio of samples that pass and fail depth test
- Uses sphere instead of hemisphere, since normal information isn’t available 所有的渲染方程的定义域都是半球,那为什么 AO 用整个球?因为 Camera 渲染出来不能既知道深度有知道法线,不知道法线就无法用半球来估计
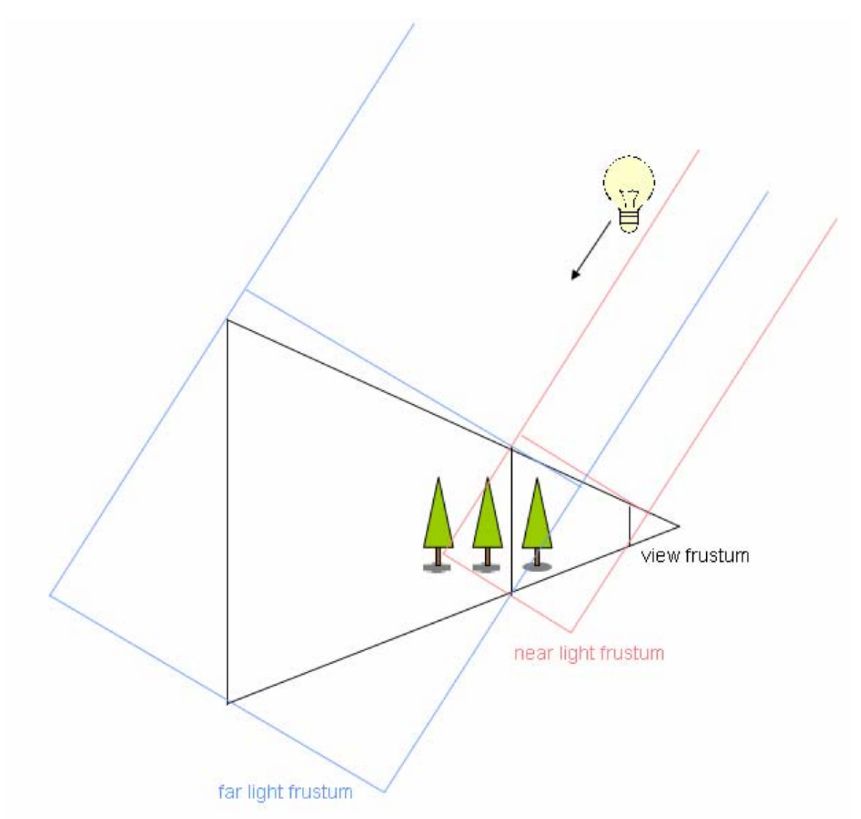
- Approximation of the scene geometry, some fails are incorrect. The one behind the red line for example. False occlusions.
- Samples are not weighted by
, so not physically accurate, but looks convincing.
Horizon based ambient occlusion (HBAO)
- Also done in screen space.
- Approximates ray-tracing the depth buffer
- Requires that the normal is know, and only samples in a hemisphere
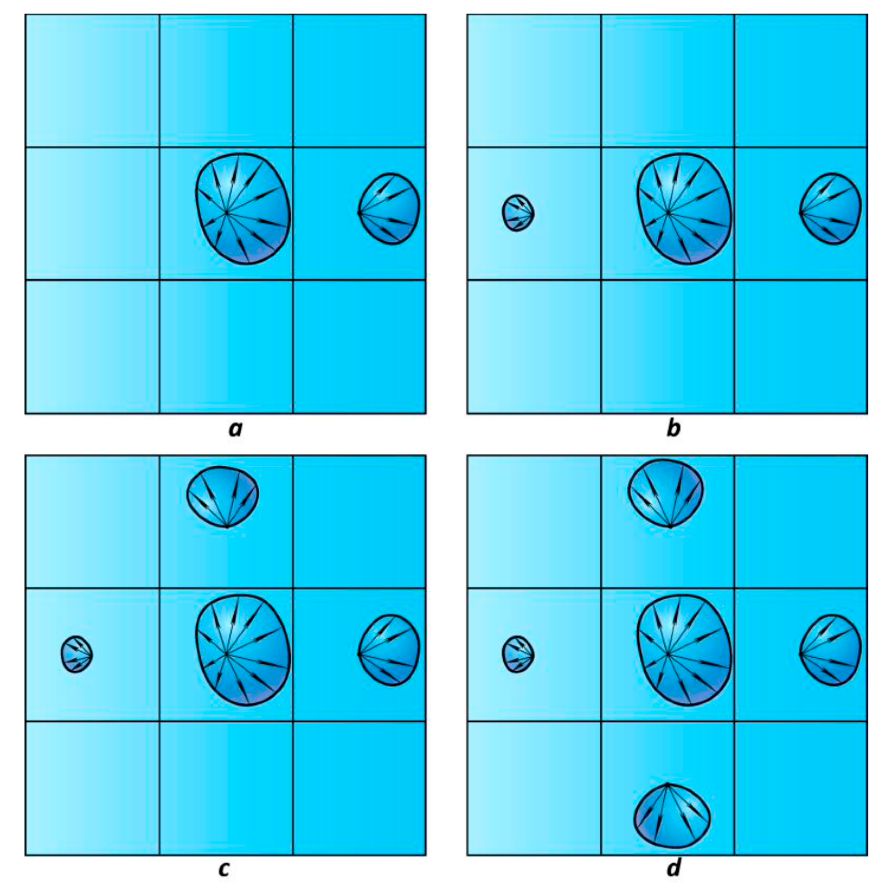
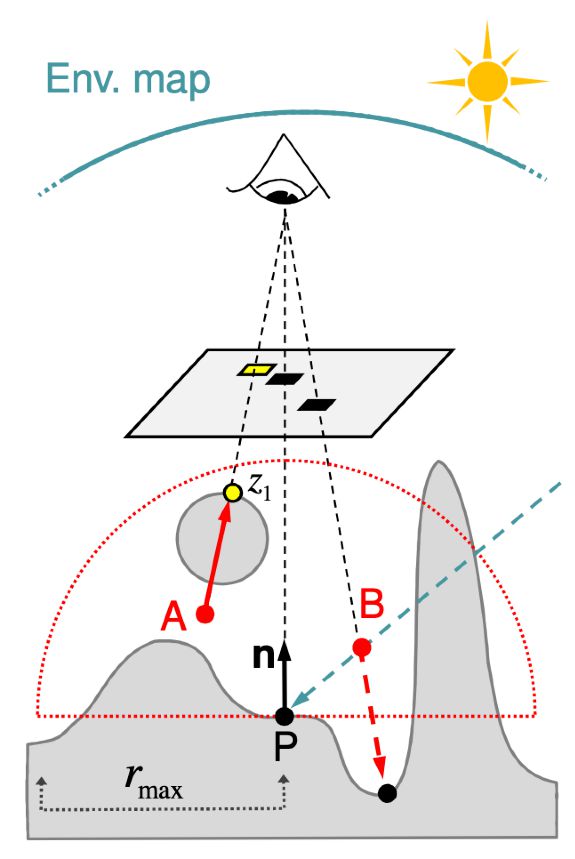
Screen Space Directional Occlusion (SSDO)
Very similar to path tracing
- At shading point
, shoot a random ray - if it does not hit an obstacle, direct illumination
- If it hits one, indirect illumination
Comparison with SSAO
AO: indirect illumination + no indirect illuminatino
在 AO 中,红色圈内的表示能接收到间接光照,橙色圈内的表示没有间接光照
DO: no indirect illumination + indirect illuminatino
在 DO 中,红色圈内则表示直接光照,橙色圈内则表示能接收到间接光照
Consider unoccluded and occluded directions separately
SSDO similar to HBAO
从
这样假设也会出现一些大问题,如第三幅图的情况——
Issues
GI in a short range 只能解决一个小的范围内的全局光照
Visibility 对于可见性不准确
Screen space issue: missing informaiton from unseensurfaces 丢失看不见部分的信息
Screen Space Reflection (SSR)
What is SSR?
- Still, one way to intoduce Global Illumination in RTR 实时渲染中实现全局光照的一种方式
- Performing ray tracing 屏幕空间上的光线追踪
- But does not require 3D primitives (triangles, etc.) 不需要三维空间中的各种信息
Two fundametal tasks of SSR
- Intersection: between any ray and scene
- Shading: contribution from intersected pixels to the shading point
Basic SSR Algorithm - Mirror Reflection
For each fragment
- Compute reflection ray
- Trace along ray direction (using depth buffer)
- Use color of intersection point as reflection color
Linear Raymarch (Find intersection point)
- At each step, check depth value
- Quality depends on step size
- Can be refined
Generate Depth Mip-Map
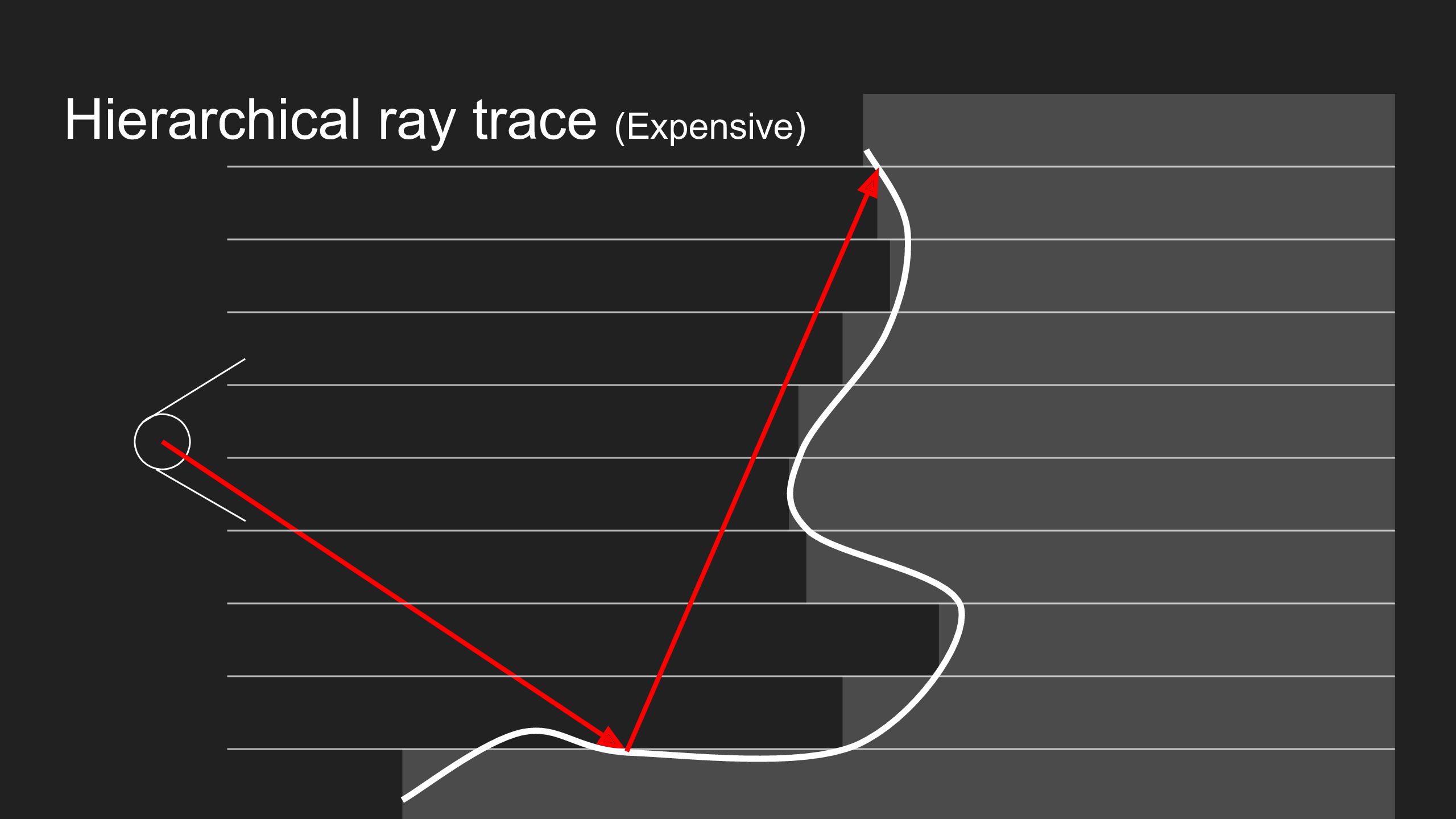
Use min values instead of average
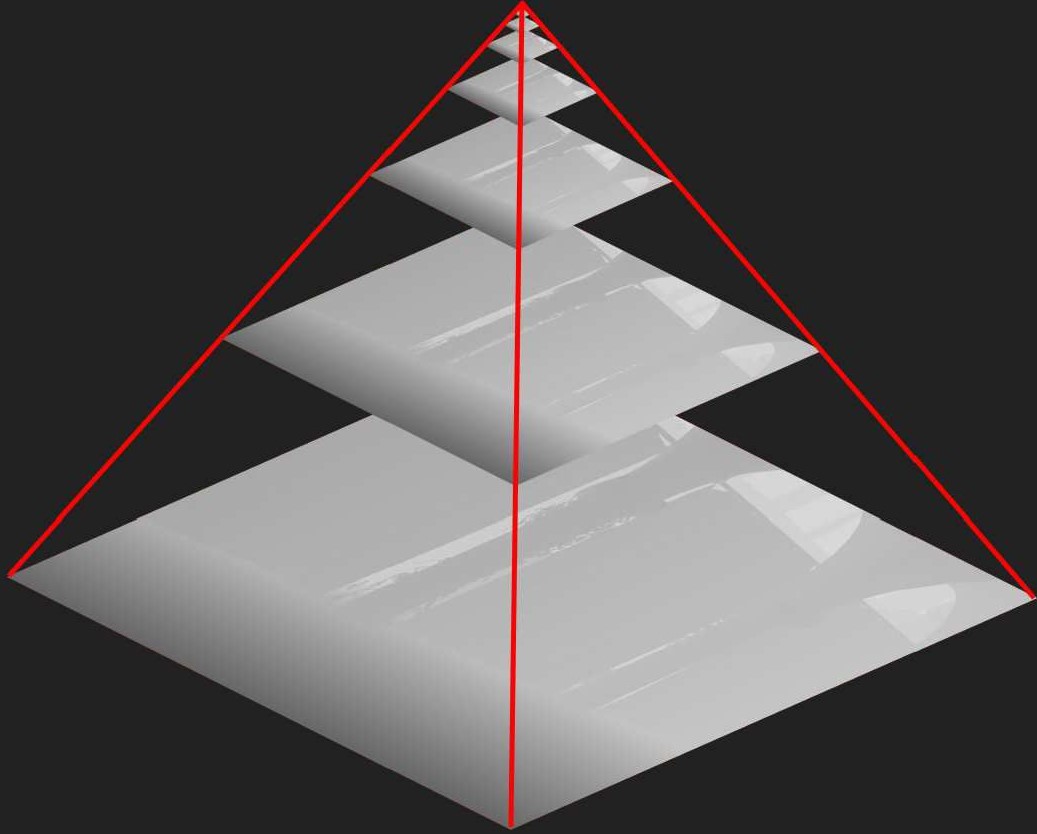
和正常的 Mip-Map 的做法不一样的地方在于,上一层的 4 个像素不再是下一层的平均值,而是最小值,也就是深度离场景最近的位置
Why Depth Mipmap
- Very similar to the hierarchy(BVH, KD-tree) in 3D 对场景建立一个层次结构
- Enabling faster rejecting of non-intersecting in a bunch 很容易跳过不可能相交的像素
- The min operation guarantees a conservative logic 这个最小的操作就会得到一个保守的逻辑
- If a ray does not even intersect a larger node, it will never intersect any child nodes of it 如果一个像素不和其上层的像素相交,也不可能和下层的像素(子节点)相交

1 | |
Problem
- Hidden Geometry Problem 对场景的理解只到外面的“壳”
- Edge Cutoff 会出现明显的 cut
- Edge Fading 根据反射光走的距离做衰减,虚化边缘
Shading using SSR
Absolutely no difference from path tracing 从在三维场景中的光线追踪到场景中“壳”的光线追踪
- Just again assuming diffuse reflections / secondary lights
Requirements
- Sharp and blurry reflections
- Contact hardening
- Specular elgonation
- Per-pixel roughness and normal
Improvements
- BRDF importance sampling
Real-Time Physically-Based Materials (surface models)
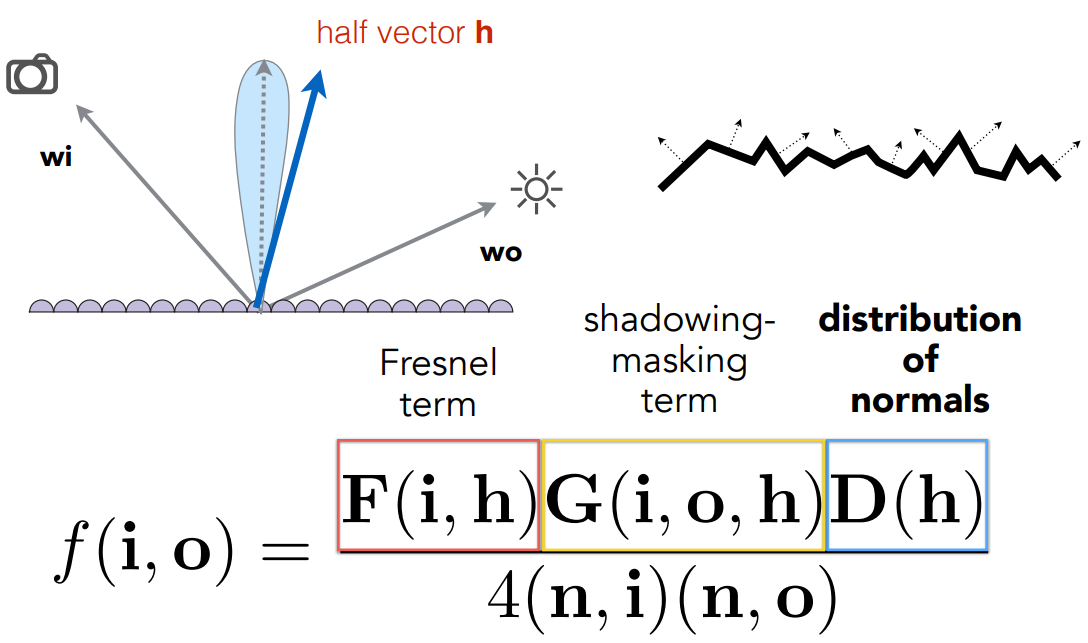
Microfacet BRDF 微表面
PBR and PBR Materials
- Physically-Based Rendering(PBR)
- Everything in rendering should be physically based
- Materials, lighting, camera, light transport, etc.
- Not just materials, but usually referred to as materials :)
- PBR materials in RTR
- The RTR community is much behind the offline community 在实时渲染中的 PBR 材质要落后于离线渲染
- “PB” in RTR is usually not actually physically based :) 在实时渲染中提到的“Physically-Based”基本都不是“Physically-Based”
- For surfaces, mostly just micorfacet models (used wrong so not PBR) and disney principled (artist friendly but still not PBR)
- For volumes, mostly focused on fast and approximate single scattering and multiple scattering (for clound, hair, skin, etc.)
Microfacet BRDF
- 从一个角度看过去,有多少能量被反射。当站在河边:
- 垂直水面看下去反射的光就会少
- 看水面远处的地方反射的光会增加
- Accurate: need to consider polarization 精确的方程式需要考虑到极化
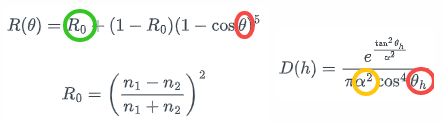
- Approximate: Schlick’s approximation 简单的估计
基础反射率
- Concentrated <==> flossy
- Spread <==> diffuse
Normal Distribution Function (NDF)
- has noting to do with the normal distribution in stats 不同于统计学中的正态分布
- Various models to describe it: Beckmann, GGX, etc.
Beckmann NDF
- Similar to a Gaussian
- But defined on the slope space 坡度空间
- 使用
作为参数可以永远保证不存在面朝下的微表面
GGX (or Trowbridge-Reitz)
- Typical characteristic: long tail 明显的特点:“长尾”
- 在 grazing angle 的时候还是有能量
Extending GGX
GTR (Generalized Trowbridge-Reitz), even longer tails 更长的“拖尾”
Shadowing-Masking Term
Or, the geometry term
- Account for self-occlusion of microfacets 解决的是微表面之间自遮挡的问题以及 grazing angles 的问题
- Shadowing – light, masking – eye 从 light 的角度看,微表面自遮挡的现象——Shadowing 从眼睛的角度看,看不到微表面的现象——Masking
- Provide darkening esp. around grazing angles 需要提供一个变暗的操作
A commonly used shadowing-masking term
- The Smith shadowing-masking term
- Decupling shadowing and masking 将 shadowing 和 masking 分开
Kulla-Conty Approximation for Multiple Bounces
Missing energy 能量损失
- Especially prominent when roughness is high 随着粗超度增大能量损失越明显
- 微表面越粗糙度,沟壑越大,当光线打到微表面的时候,反射的光越容易被其他的微表面挡住,损失的能量越多
Adding back the missing energy
- Heitz et al. 2016 基于模拟的方法
- But can be too slow for RTR
The Kulla-Conty Approximation
What’s the overall energy of an outgoing 2D BRDF lobe[1]?
Key Idea 设计了一种 BRDF,使得丢失的能量正是原来丢掉的部分
We can design an additional lobe that intergrates to
有多少能量被遮挡掉 The outgoing BRDF lobe can be different for different incident dir.
Consider reciprocity, it should be of the form
Therefor,
Precompute / tabulate
What if the BRDF has color?
- 有颜色意味着有能量被吸收,意味着能量有损失
- So we’ll just need to compute the overall energy loss 由于颜色造成的能量损失
Define the average Frensel (how much energy is reflected) 不管入射角多大,计算平均每次反射会损失多少能量
Therefor, the proportion of energy (color) that 最后能看到的能量的构成
- You can directly see:
- After one bounce then be seen:
- …
- After
bounces then be seen:
- You can directly see:
Adding everything up, we have the color term 级数求和得到最终的结果
Which will be directly multiplied on the uncolored additional BRDF
Shading Microfacet Models using Linearly Transformed Cosines (LTC)
Solves the shading of microfacet models
- Mainly on GGX, though others are also fine
- No shadows 不考虑阴影
- Under polgon shaped lighting 多边形光源
- Split Sum 本质上是做环境光下的 Shading
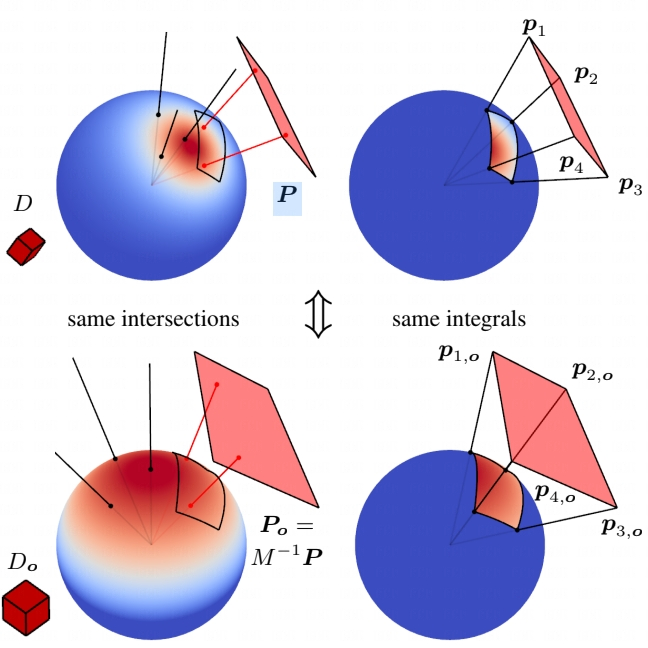
Key Idea
- Any outgoing 2D BRDF lobe can be transformed to a cosine
- The shape of the light can be transformed along
- Integration the transformed light on a cosine lobe is analytic 转换后的积分是有 解析解 的
Observations 任何 cosine 的 lobe 都可以通过
变换,变换成 BRDF 的 lobe - BRDF
Cosine - Direction:
- Domain to integrate:
- BRDF
- Approach
A simple change of variable 替换变量
- 渲染方程有三个部分:入射光、Cosine、BRDF,
表示把 Cosine 和 BRDF 合到了一起,在多边形覆盖的立体角内进行积分 - 通过这个变换把
变成 Cosine - 引入 Jacobi 项
- 给定一个 GGX 模型的法线分布,已知出射的 BRDF 的 lobe,变换成 Cosine;从不同的方向观察得到不同的 BRDF 的 lobe,每一种 lobe 都要变换成 Cosine,对于常见的 lobe 可以预计算一个变换矩阵
- 各项异性的表面可以用 LTC,各项异性:有一根光线打入后,根据不同的观察方向,会有不同的 BRDF
Disney’s Principled BRDF
- Motivation
- No physically-based materials are good at rep. all real materials 微表面模型并不能表示所有的材质
- Physically-based materials are not artist friendly 对“艺术家”来说非常不友好
- e.g. “the complex index of refraction
”
- e.g. “the complex index of refraction
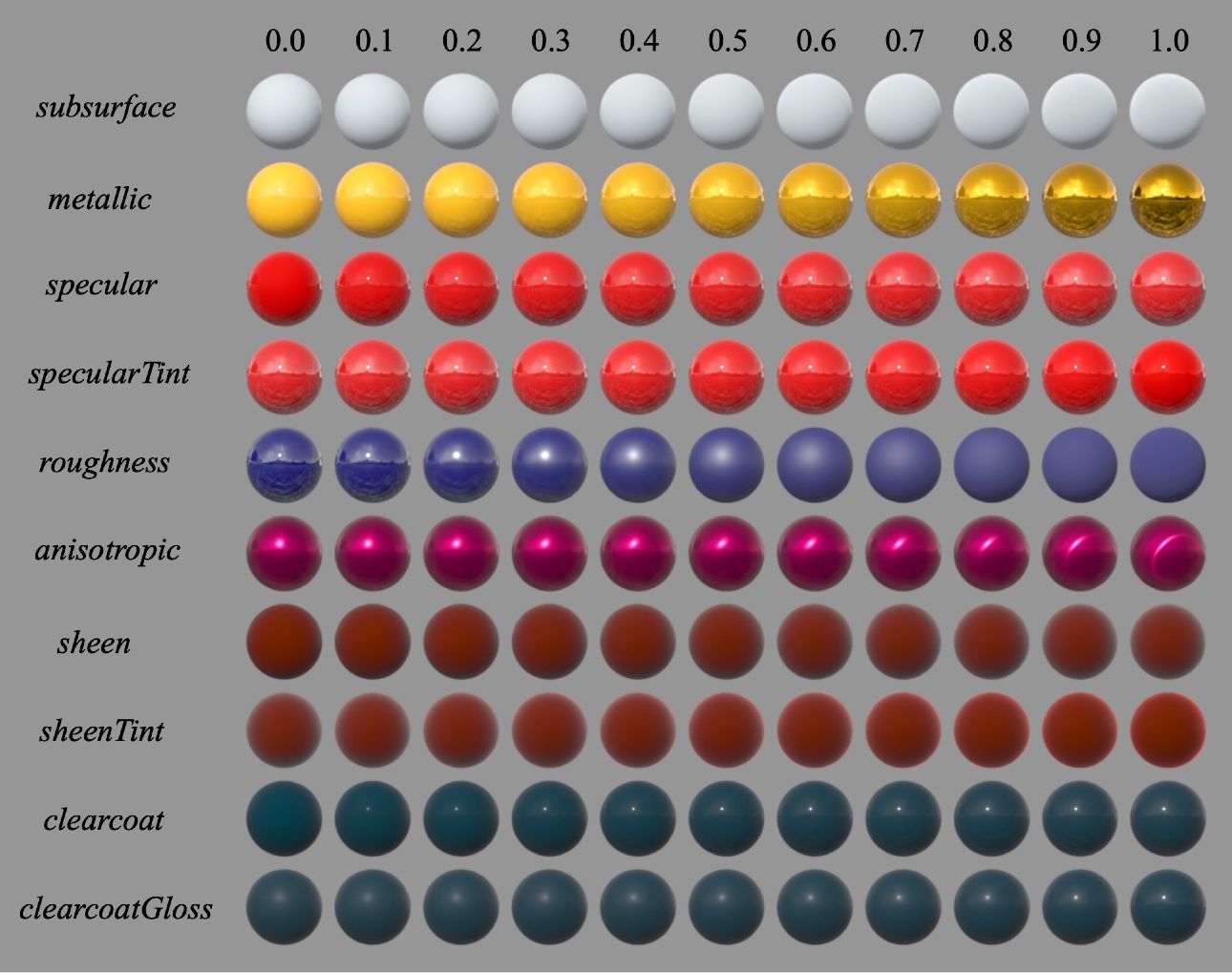
- A table showing the effects of individual parameters
- subsurface 次表面散射 比 Diffuse 还要平的效果
- metallic 金属性
- specular 相当于 Blinn-Phong 模型中的
,控制镜面反射区域的大小 - specular Tint 可以表示镜面反射的颜色
- roughness 粗糙程度
- anisotropy 各项异性
- sheen 雾化效果
- sheen Tint 雾化效果(颜色)
- clearcoat 清漆
- clearcoat Gloss 清漆(光滑程度)
Non-Photorealistic Rendering (NPR 非真实感渲染)
Characteristics of NPR
- Starts from photorealistic rendering
- Exploits abstraction
- Strengthens important parts
Applications of NPR
- Art 艺术
- Visualization 可视化
- Instruciton 说明书
- Education
- Entertainment 娱乐
- …
Outline Rendering
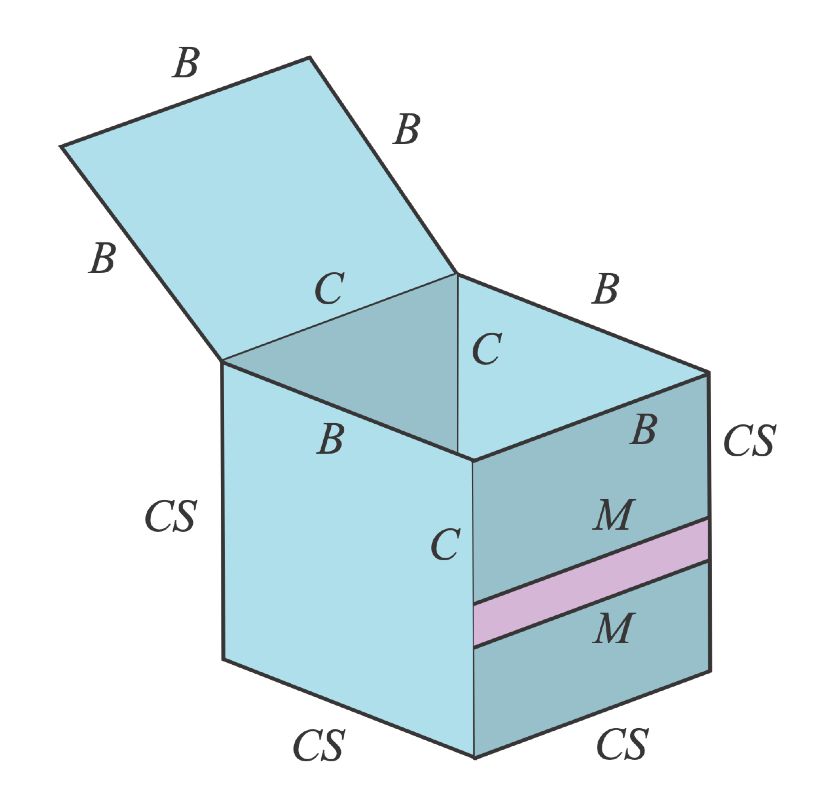
- Outlines are not just contours 不仅仅是轮廓
- [B]oundary / border edge 边界;边缘
- [C]rease 折痕
- [M]aterial edge 材质的边界
- [S]ilhouette edge 剪影;有多个面共享的边界
- 必须是物体的外轮廓边界
- 有多个面共享的边界
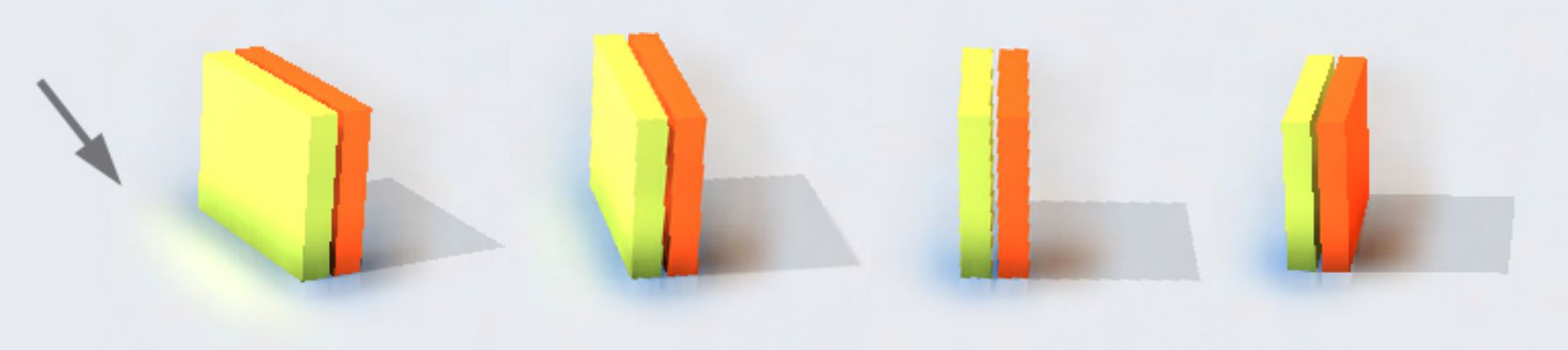
Outline Rendering – Shading [Silhouette]
Darken the surface where the shading normal is perpendicular to viewing direciton 观察的方向和物体上某一点的法线方向几乎垂直的边就是 [Silhouette] 边,但会造成描边粗细不一样
Outline Rendering – Geometry
Backface fattening
- Render frontface normally
- “Fatten” backfaces, then render again 背向观察者的面上的三角面片都扩大,然后进行渲染
- Extension: fatten along vertex normals
Outline Rendering – Image
Edge detection in images
- Usually use a Sobel detector
Color blocks 大量的色块
- Hard shading: thresholding on shading 在 shading 的过程中阈值化
- Posterization: thresholding on the final image color 在最后的图像上阈值化
- May not be binary 阈值化不一定只是二值化
Some Note
- NPR is art driven
- But you need the ability to “translate” artists’ needs into rendering insights
- Communicaiton is important
- Sometimes, per character, even per part
Real-Time Ray Tracing (RTRT)
In 2018, NVIDA announced GeForce RTX series (Turing architecture) 有了 RTX 之后,允许我们每秒追踪更多的光线 (tensor core 加速神经网络感知;RT core 加速光线追踪),每秒钟能够追踪 10G 的光线,然而实际应用中:只能一个像素用一个样本采样,得到光线追踪的结果
1 SPP(sample per pixel) path tracing = 1 rasterization (primary) + 1 ray (primary visibility) + 1 ray (secondary bounce) + (secondary visibility)
- rasterization 光栅化和 primary ray 的结果是等价的,但是光栅化可以更快
- 1 SPP 噪声是一个夸张的结果
- 所以 RTX 关键的技术是 Denosing 降噪
Goals with 1 SPP
- Quality (no overblur, no artifacts, keep all details …)
- Speed (less than 2ms to denoise one frame)
Industrial Solution Temporal
- Suppose the previous frame is denoised and reuse it 认为当前帧的前一帧是已经滤波好了的
- Use motion vectors to find previous locations
- Enssentially increased SPP
G-Buffers
- The auxiliary infomation acquired FOR FREE during rendering 在渲染场景的过程中“免费”得到的一些信息,但 FOR FREE* 并不是 100% 的“免费”
- Usually, per pixel depth, normal, world coordinate, etc.
- Therefore, only screen space info
Back Projection
Pixel
in the current frame Where was it in the last frame i - 1 ?要找到上一帧像素在哪,但是可以换一种描述 - What pixel in fram
contains the same place/point that you see through pixel in frame ? 在上一帧哪一个像素是在当前帧所观察到的点
Back projection
- if world coord
is available as a G-buffer, just take it 第一种方法 - Otherwise,
(still require value) 第二种方法 - Motion is known:
, thus 物体如果存在运动 - Project world coord in frame
to its screen:
- if world coord
Temporal Accum./Denoising
: unfiltered : filtered
This frame (
\bar{C}^{(i)} = \alpha\bar{C}^{(i)} + (1 - \alpha)\tilde{C}^{(i - 1)}, \alpha \in [0.1, 0.2]
$$
80% - 90% cobtributions from last frame(s)
Temporal Failure
Temporal info is not always available
- Failure case 1: switching scenes (burn-in period) 切换场景或者第一帧
- Failure case 2: walking backwards in a hallway (screen space issue) 在走廊中倒退镜头,越来越多的信息会出现在视野范围内
- Failure case 3: suddenly appearing background (disocclusion)
Adjustments to Temporal Failure
- Clamping: Clamp previous toward current 把上一帧的结果“拉”到当前帧
- Detection 检测到底要不要用以前的信息
- Use e.g. object ID to detect temporal failure 每个物体都给定一个渲染 ID
- Tune
, binary or continuously 微调 - Possibly strengthen / enlarge spatial filtering
会重新引入一些噪声
Some Side Notes
- The temporal accumulation is inspired by Temporal Anti-Aliasing(TAA) 这两个概念几乎等同
- They are very similar
- Temporal reuse essentially increses the sampling rate
Implementation of filtering
Suppose we want to (low-pass) filter an image 希望保留低频信息
- To remove (usually high-frequency) noise
- Now only focus on the spatial domain spatial domain 空间域区别于频域
Inputs
- A noisy image
- A filter kernel
, could vary per pixel
Output - A filterd image
Let’s assume a Gaussian filter centered at pixel
- Any peixl
in the neighborhood of would contribute 从高斯的 范围内取,包括本身 - Based on the distance between
and
目的是做归一化
Test whetheris zero (for other kernels) 对于其他的滤波核需要判断 不为 0,高斯滤波核必定不为 0
Color can be multi-channel
Bilateral filtering 双边滤波
Observation The boundary <-> drastically changing colors 边界就是颜色变换非常剧烈的地方
Idea
- How to keep the boundary?
- Let pixel
contribute less if its color is too different to 如果 和 颜色差距很大,就让 的贡献变小
Joint Bilateral filtering 联合双边滤波
- Gaussian filtering: 1 metric (distance) 高斯滤波提出了一个标准——距离
- Bilateral filtering: 2 metric (position distance & color distance) 双边滤波提出了两个标准
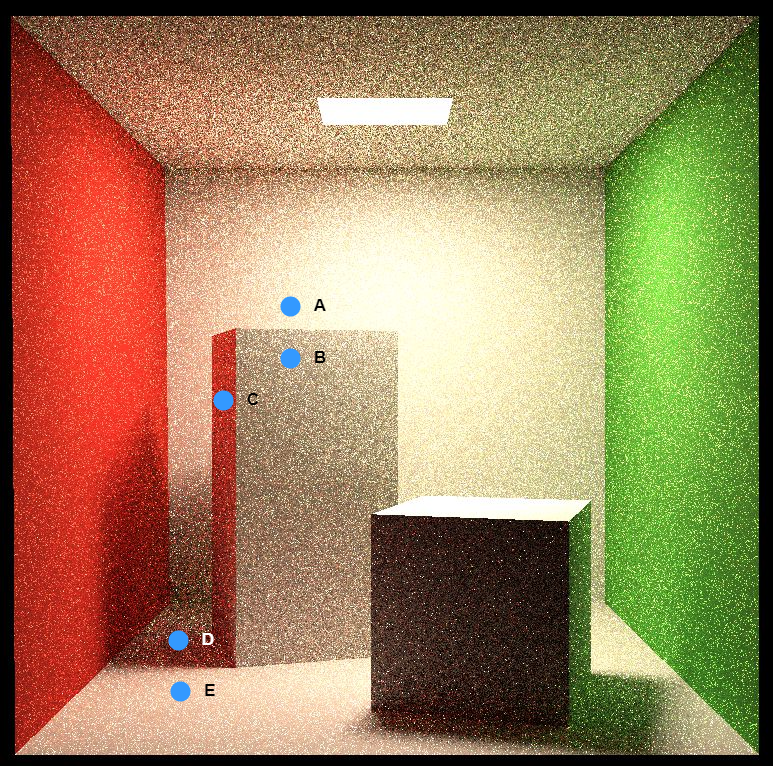
Suppose we consider 假设考虑 G-Buffer 生成的两种种额外的信息
- Depth
- Normal
- Color 颜色不属于 G-Buffer 生成出来的
Why we do not blur the boundary between
- A and B: depth
- B and C: normal
- D and E: color
Implementing Large Filters
- For samll filters, this is fine (e.g.
) - For large filters, this can be prohibitively heavy (e.g.
)
Solution 1: Separate Passes
Consider a 2D Gaussian filter
- Seprate it inro a horizontal pass (
) and a vertical pass ( ) 对于任何一个像素来说,都取它周围 或 的范围进行高斯滤波 - #queries:
查询次数从 到
为什么能够从
到 A 2D Guassian filter kernel is separable 二维的高斯函数的定义就是可以拆分的
filtering == convolution 滤波就是卷积
Solution 2: Progressively Growing Sizes
A-trous wavelet
- Multiple passes, each is a
filter - Ther interval between samples is growing (
) (save e.g. ) 样本和样本之间的间隔都是 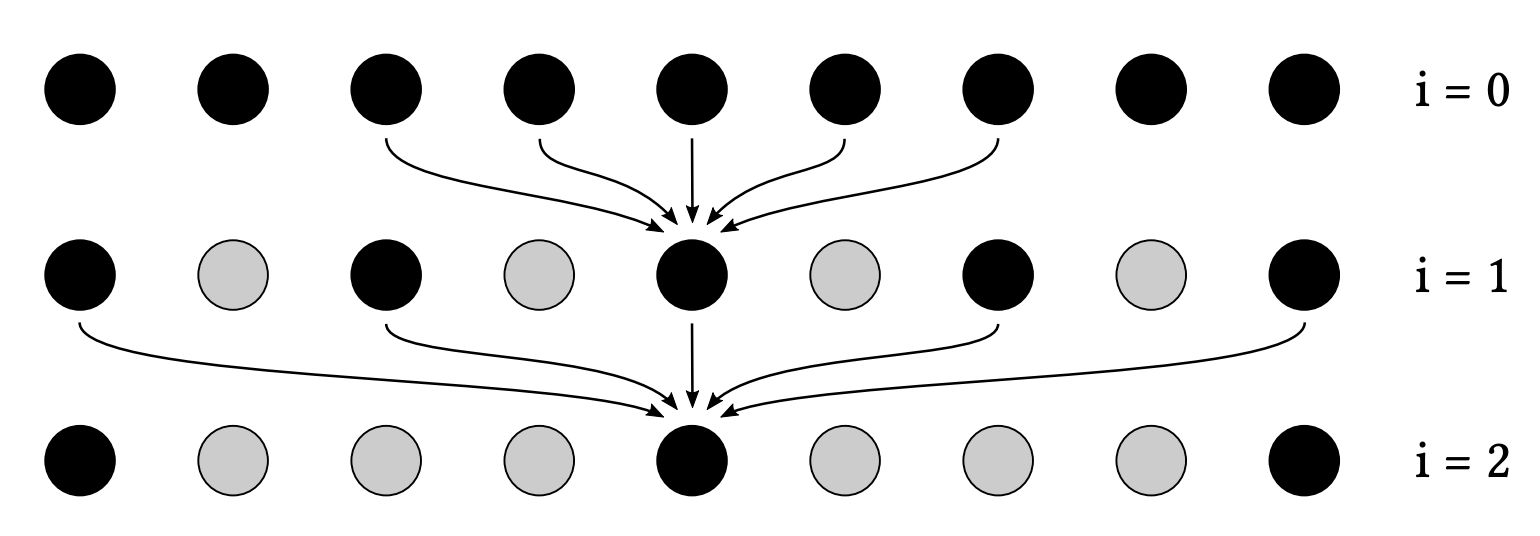
Why growing sizes?为什么要用逐渐增大的 filter,而不是直接使用一个大的 filter
Applying larger filter == removing lower frequencies 用更大的 filter 意味着去除更低的频率,用越小的 filter 意味着去掉更高的频率,不断的去除不同的频率
Why is it safe to skip samples? 为什么能够跳着采样
Sampling == repeating the spectrum 采样在频域就是搬移频谱,将有规则的频谱段搬移到无规则的频谱段
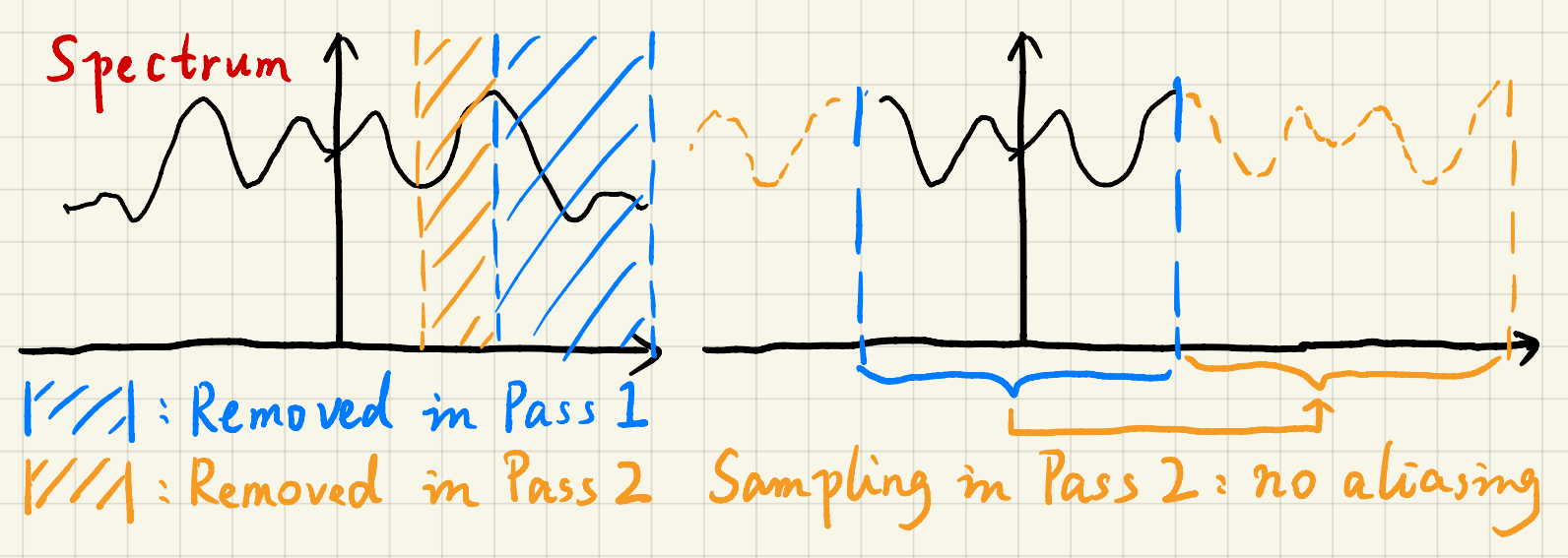
如图所示,通过第一个 pass,高频率部分被干掉,所有的频率都集中在蓝色区域内,第二个 pass 相当于做了一个采样,也就是把第一个 pass 留下来的频谱向左或向右搬移一次
Outlier Removal
Filtering is not aimighty
- Sometimes the filtered result still noisy, even blocky
- Mostly due to extremely bright pixels (outliers)
Outlier Detection and Clamping
- For each pixel, take a look at its e.g.
neighborhood - Compute mean and variance 计算均值和方差
- Value outside
outlier 在范围之外的就是 outlier - Clamp any value outside
to this range - Note: this is NOT throwing away (zero out) the outlier 并不是丢弃掉 outlier,而是把 outlier 限制到一个范围内
Spatiotemporal Variance-Guided Filtring (SVGF)
3 factors to guide filtering

- Depth
A and B are on the same plane, of similar color, so they should be contribute to each other. But the depth between A and B are very different
只是有衰减的形状但并不是高斯的形式,
- Normal
点积可以确定两个向量的差异,
Note: in case normal maps exist, use macro normal 有法线贴图的情况
- Color
B 点可能刚好取到噪声上,需要用 B 点标准差,所以要用到 SVGF 中的 Variance- Caculate spatially in
- Also averaged over time using motion vectors
- Take another
spatial filter before use 就是在使用前计算出来的
- Caculate spatially in
Luminance (grayscale color value)
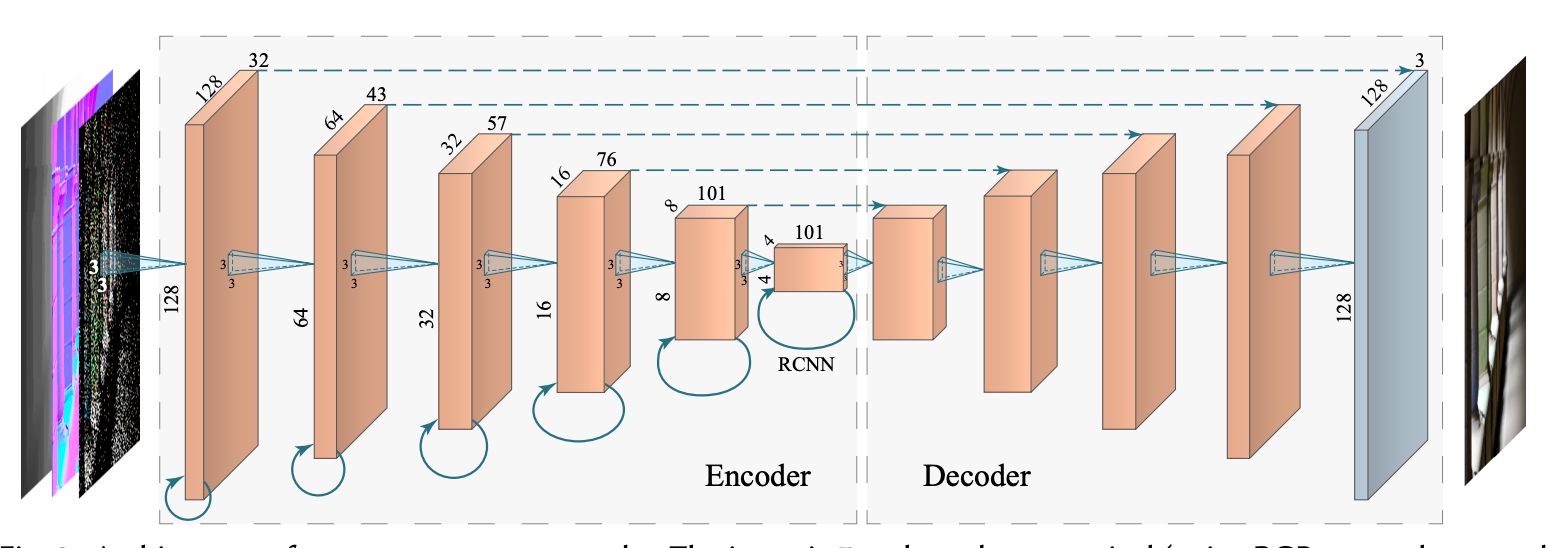
Recurrent AutoEncoder (RAE)
Interactive Reconstruction of Monte Carlo Image Sequence using a Recurrent denoising AutoEncoder
- A post-processing network that does denosing
- With help of G-buffers
- The network automatically performs temporal accumulation
Key architecture design
- AutoEncoder (or U-Net) structure
- Recurrent convolutional block
A Glimpse of Instustrail Solution
Temporal Anti-Aliasing (TAA)
Why aliasing?
- Not enough samples per pixel during rasterization
- Therefor, the ultimate solution is to be use more samples
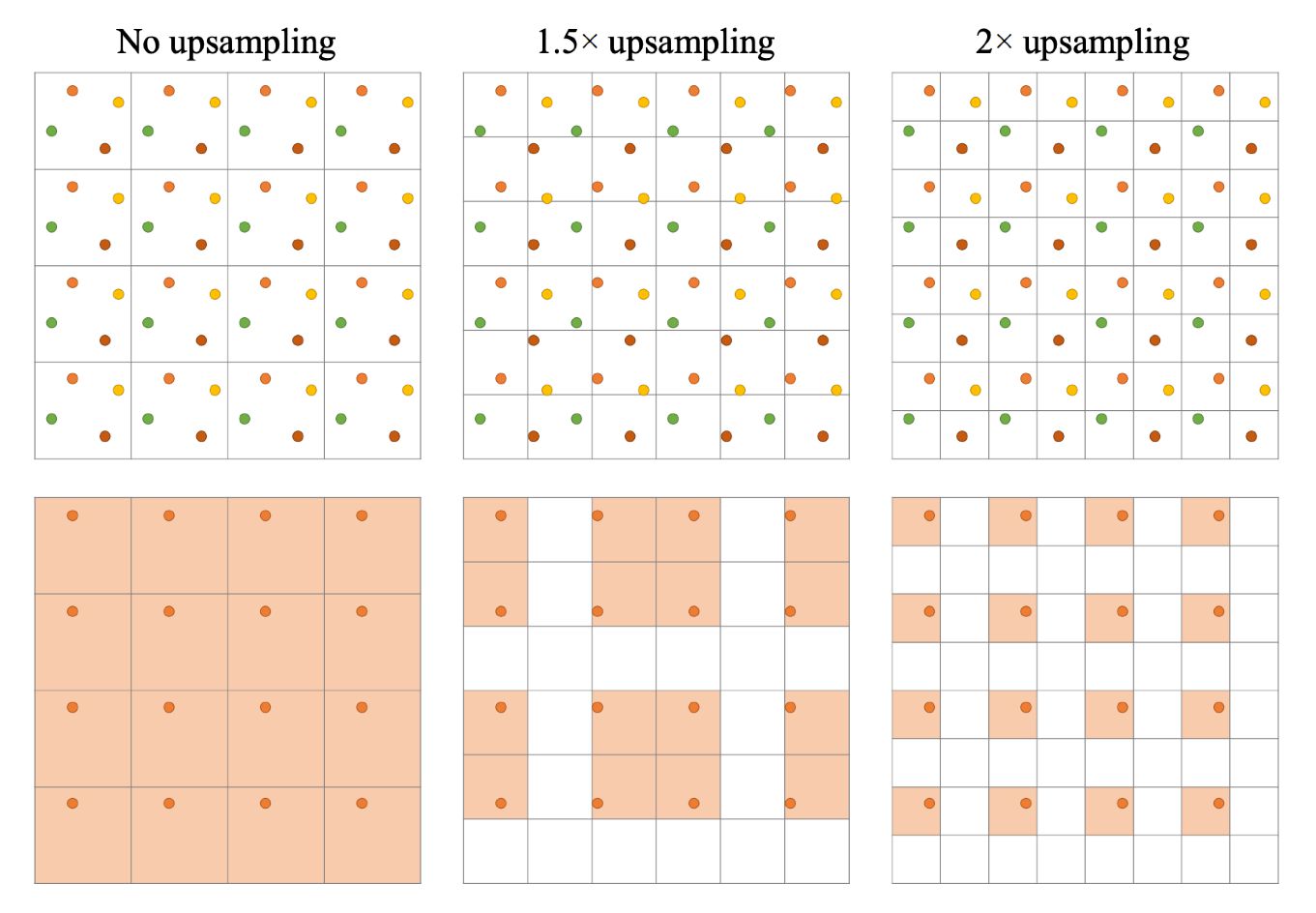
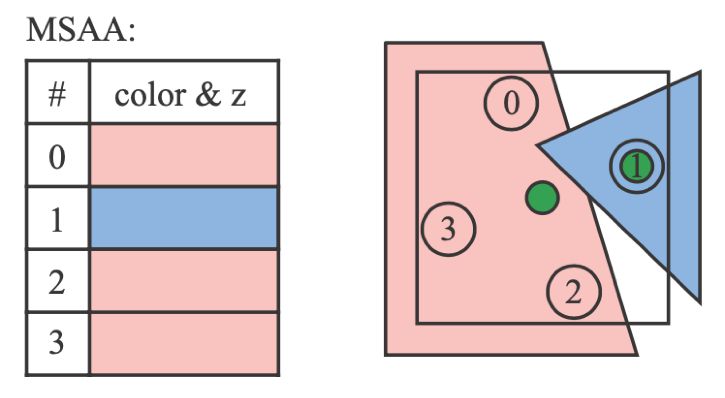
- MSAA (Multisample) vs SSAA (Supersampling)
- SSAA is straightforward
- Renderring at a larger resolutiont, then downsample 把场景按照原来几倍的分辨率渲染,渲染完成后再进行降采样
- The ultimate solution, but costly 基本上 100% 正确
- MSAA: an improvement on performance 在 SSAA 基础上做了近似是的效率能够提上去
- The same primitive is shaded only once 每个三角形只采样一次,通过维护一个表来实现
- Reuse samples across pixels
- SSAA is straightforward
- State of the art image based anti-aliasing solution
- SMAA (Enhanced subpixel morphological AA)
- History: FXAA → MLAA (Morphological AA) → SMAA
- G-buffers should never be anti-aliased
Temporal Super Resolution
Super resolution (or super sampling)
- literal understanding: increasing resolution 给一张低分辨率的图变成高分辨率的图
- Source 1 (DLSS 1.0): out of nowhere / completely guessed 信息来源什么都没有,全靠猜
- Source 2 (DLSS 2.0): from temporal information
- Main Problem
- Upon temporal failure, clamping is no longer an option
- Because we need a clear value for each smaller pixel
- Therefore, key is how to use temporal info samrter than clamping
- An important practical issue
- If DLSS itself runs at 30ms per frame, it’s dead already
- Network inference performance optimization (classified)
- Main Problem
Deferred Shading
Originally invented to save shading time 节省 shading 的时间
Consider the rasterization process
- Triangles → fragments → depth test → shade → pixel
- Each fragment needs to be shaded (in what scenario?) 在什么情况下每一个 fragment 都需要 shading,从远到近渲染可能会出现
- Complexity:
Key Observation
- Most fragment will not be seen in the final image 很多 fragment 最后不会被看到,但是中间某个阶段对其进行了着色
- Due to depth test / occlusion
- Cane we only shade those visible fragments?
Modifying the rasterizaiton process
- Just rasterize the scene twice 光栅化两次
- Pass 1: no shading, just update the depth buffer 第一次不做着色,只对深度缓存进行更新
- Pass 2 is the same (why does this guarantee shading visible fragment only?) 第二次光栅化开始做着色
- Implicitly, this is assuming rasterzing the scene is way faster then shading all unseen fragments (usually trye) 跑一边光栅化的时间要比渲染全部 fragments 的时间要快
Issue
- Difficult to do anti-aliasing 不能用 AA
- But almost completely solved by TAA 但是 TAA 是可以用的 为什么?
Tiled Shading
Subdivide the screen into tiles of e.g.
Not all lights can illuminate a specific tile 光源覆盖的范围是随着距离衰减的,可以把覆盖范围想象成球形
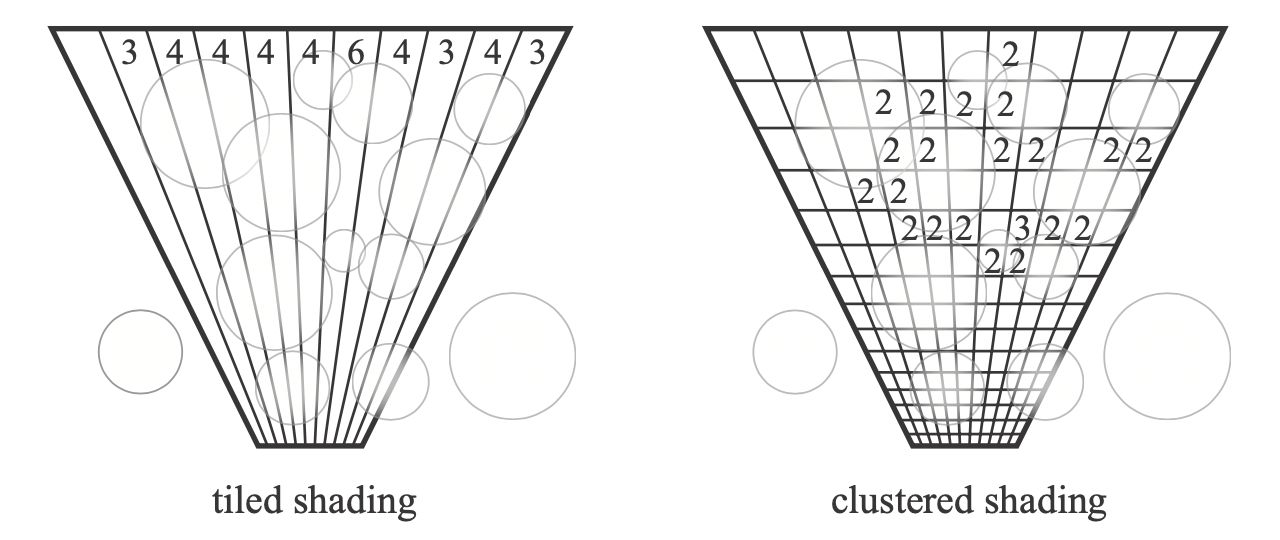
Clustered Shading
- Further subdivide each tile into different depth segments
- Essentially subdividing the view frustum into a 3D grid
复杂度更加减少,但是实现越来越复杂
Level of Detail (LoD) Solutions
Example
- Cascaded shadow maps 距离 Camera 越远的地方就可以用越粗糙的 Shadow Map
- 范围有一定的重叠,保证切换不同大小的 Shadow Map 有平滑的过度
- Cascaded LPV
- Geometric LoD
- Based on the distance to the camera, choose the right object ot show
- Popping artifacts? Leave it to TAA
- This is Nanite in UE5 动态的选取 LoD 的实现
Key Challenge
- Transition between different levels 不同层级之间的转换
- Usually need some overlapping and blending near boundaries
Global Illumination Solutions
A possible solution to GI may include
- SSR for a rough GI approximation
- Upon SSR failure, switching to more complex ray tracing.
- Either hardware(RTRT) or software 或者用硬件做 tracing,或者用软件做 tracing
- Software ray tracing
- HQ SDF for individual objects that are closed-by 近处的用高质量的 SDF,SDF 可以让我们快速的在 shader 里面做 tracing
- LQ SDF for the entire scene 远处的用低质量的 SDF
- RSM if there are strong directional / point light 非常强的方向光源或点光源用 RSM
- Probes that stores irradiance in a 3D grid (Dynamic Diffuse GI, DDGI)
- Hardware ray tracing
- Doesn’t have to use the original geometry, but low-poly proxies 用简化了的模型代替原始模型
- Probes (RTXGI)
- Software ray tracing
The hightlighted solutions are mixed to get Lumen in UE5
A lot of uncovered topics
- Texturing an SDF SDF 贴纹理
- Transparent material and order-independent transparency 透明物体渲染顺序
- Particle rendering
- Post processing (depth of field, motion blur, etc.)
- Random seed and blue noise 实时渲染中怎么利用随机数种子 蓝噪声
- Foveated rendering
- Probe based global illumination 基于探针的 GI
- ReSTIR, Neural Radiance Caching, etc. 更先进的实时渲染技术
- Many-light theory and light cuts
- Participating media, SSSSS 云烟雾,次表面散射
- Hair appearance
- …
- [1] 类似花瓣的“瓣”,BRDF 是四维的,但是给定观察方向,会反射出来一个类似于“花瓣”的分布 lobe: n. (脑、肺等的)叶;裂片;耳垂;波瓣